
Point Transformer 论文
论文: Point Transformer
代码: https://github.com/POSTECH-CVLab/point-transformer
引言
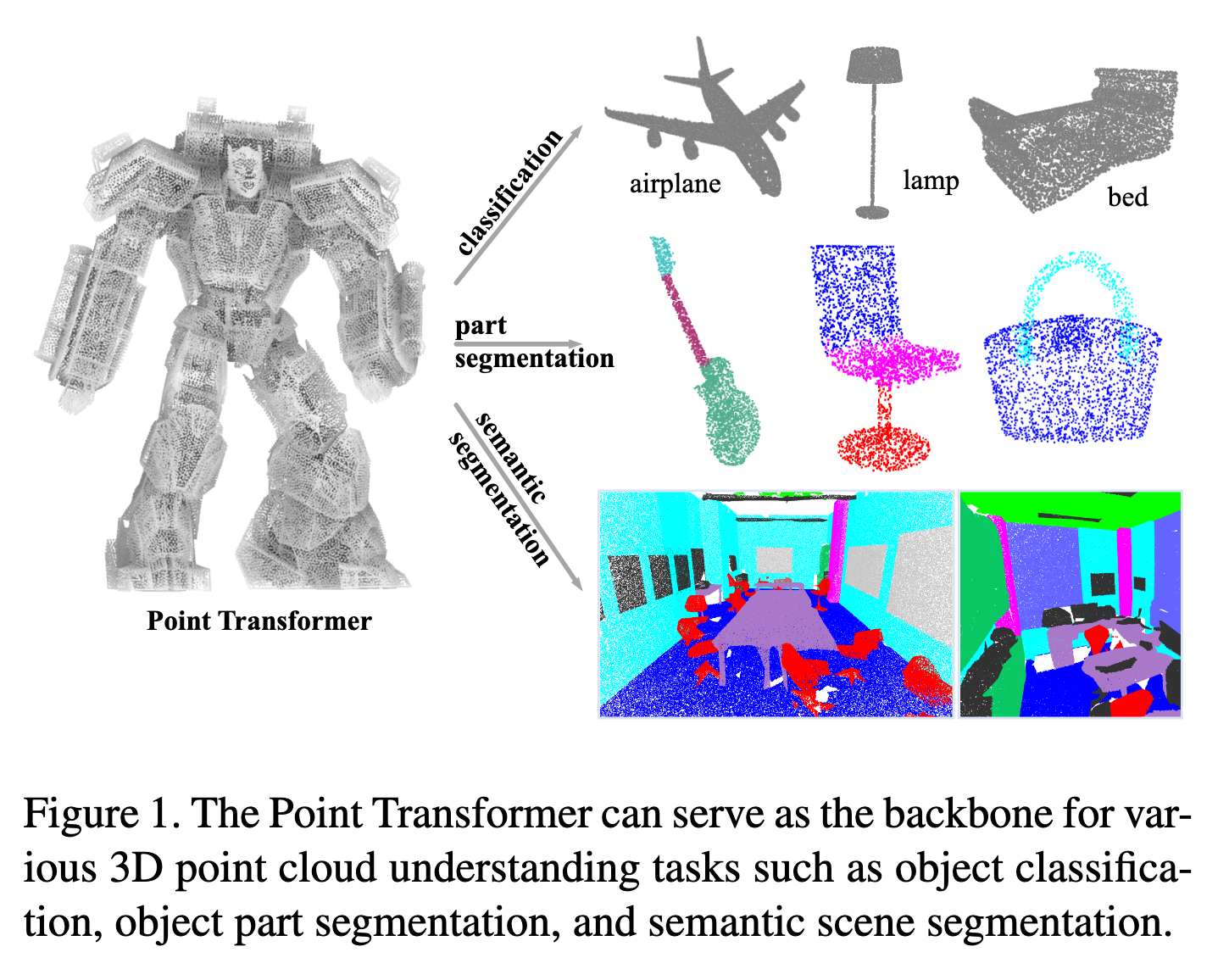
背景与动机(如图1所示):
3D 点云广泛存在于自动驾驶、增强现实和机器人等应用中,但它们与图像不同,是嵌入在连续空间的集合,因此传统基于卷积的视觉网络难以直接应用。
现有方法主要有三类:
将点云体素化后应用 3D 离散卷积,但计算和内存开销大,并未充分利用点云稀疏性。
使用稀疏卷积、池化或连续卷积直接在点上操作,部分缓解了计算负担。
将点集构建成图结构,通过消息传递进行信息传播。
Transformer 的自注意力机制天然适合点云,因为它对输入的排列和数量不敏感,而点云本质上就是集合结构。
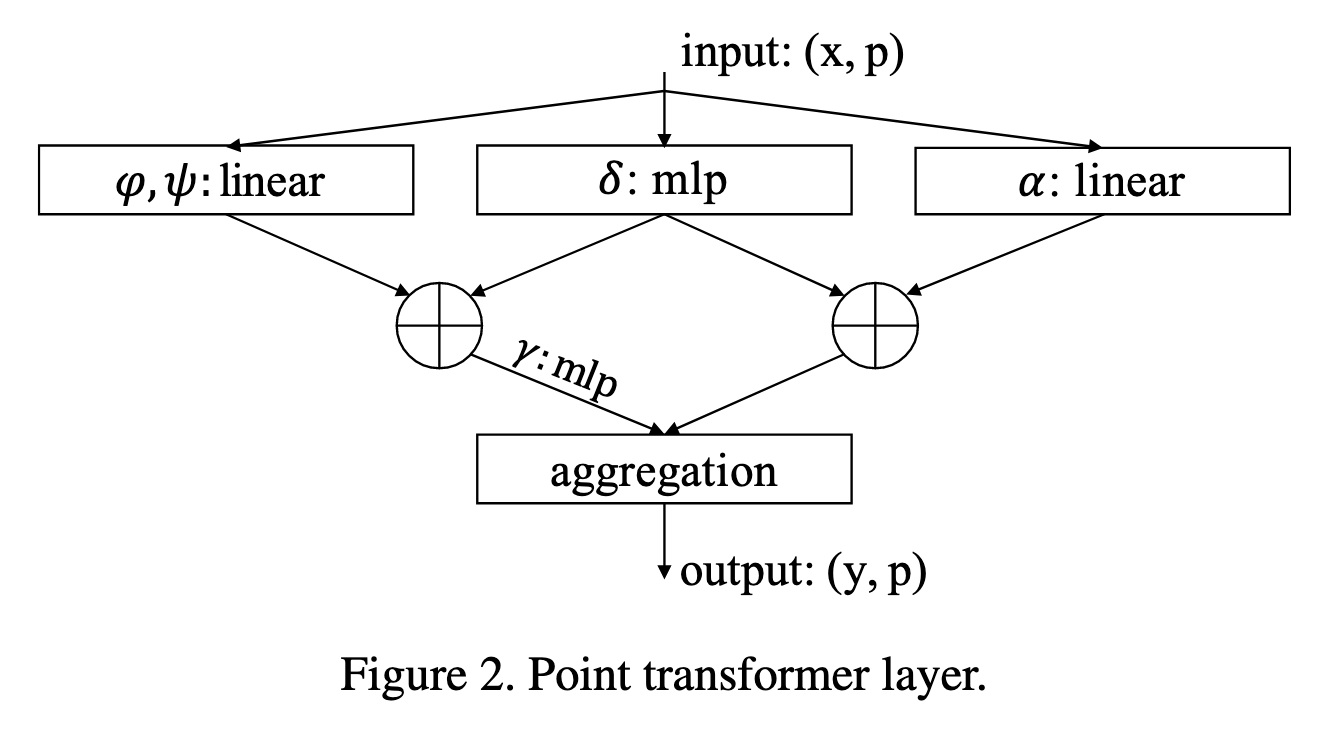
方法设计(如图2所示):
我们提出了 Point Transformer 层,能够处理点云的排列和数量不变性,通过局部邻域的自注意力传播信息。
在网络设计上,完全由自注意力和逐点操作组成,不依赖卷积操作,也不需要事先体素化。
通过对自注意力算子形式、局部邻域应用方式及位置编码方法的设计,构建了高表达能力的网络骨干,可用于多种 3D 理解任务。
主要贡献:
设计了高度表达能力的 Point Transformer 层,本质上适合点云处理,对排列和数量不敏感。
构建了基于 Point Transformer 层的高性能网络,可作为 3D 场景理解的通用骨干,适用于分类和密集预测任务。
在多个领域和数据集上进行了广泛实验,创下多个最先进水平,超越大量先前方法。
相关工作
3D 点云与二维图像不同,是无序分散在三维空间的点集合,因此传统卷积网络难以直接应用。基于学习的方法主要分为三类:
投影型网络:
将点云投影到二维平面,生成规则图像,然后使用 2D CNN 提取特征,再进行多视角融合。
TangentConv 将局部表面几何投影到切平面,生成切平面图像,用二维卷积处理,但依赖切平面估计。
缺点:投影会压缩几何信息,可能未充分利用点云稀疏性,平面选择和三维遮挡可能影响识别性能。
体素型网络:
将点云体素化,再在三维网格上进行卷积。
优点:将不规则点云转化为规则表示,便于卷积操作。
缺点:分辨率增加时计算和内存开销大。
解决方案:利用稀疏性,如 OctNet 使用不平衡八叉树,稀疏卷积只计算非空体素【9,3】。
注意:体素化量化仍可能导致几何细节丢失。
点型网络:
直接处理嵌入连续空间的点云集合,无需量化或投影。
PointNet 使用排列不变操作(逐点 MLP + 池化)聚合集合特征。
PointNet++ 在层级空间结构中增加对局部几何布局的敏感性。
可结合高效采样策略,提高计算效率【27,7,46,50,11】。
基于图的方法:
将点集构建成图,进行消息传递或图卷积:
DGCNN 在 kNN 图上进行图卷积
PointWeb 密集连接局部邻域
ECC 使用动态边条件卷积
SPG 使用超级点图表示上下文关系
KCNet 使用核相关 + 图池化
Wang 等研究局部谱图卷积
GACNet 使用图注意力卷积
HPEIN 构建层级点-边交互架构
DeepGCNs 探索图卷积深度在 3D 场景理解中的优势
基于连续卷积的方法:
PCCN 将卷积核表示为 MLP
SpiderCNN 使用多项式函数族定义卷积核权重
Spherical CNN 解决 3D 旋转等变性
PointConv 和 KPConv 根据坐标构建卷积核
InterpCNN 使用坐标插值生成卷积权重
PointCNN 对无序点云重新排序
Ummenhofer 等将连续卷积应用于粒子流体动力学
Transformer 在机器翻译和 NLP 上取得巨大成功,也启发了 2D 图像识别。 自注意力本质上是集合操作:位置信息作为元素属性处理,而点云本质上就是带位置属性的点集合。
现有点云注意力方法多为全局注意力:
计算开销大
不适合大规模场景
使用标量点积,所有通道共享聚合权重
本文方法创新点:
在局部应用自注意力,使网络可扩展到百万点大场景
使用向量注意力,提高精度
强调位置编码的重要性,而先前方法通常忽略
总体效果:设计合理的自注意力网络可扩展到复杂大规模场景,并显著提升点云理解性能
方法
背景
Transformer 和自注意力在 NLP 和图像分析中已经非常成功。自注意力分为两种:标量注意力和向量注意力。
标量注意力
输入是一组特征向量
其中
向量注意力
注意力权重是向量,可以对不同通道单独调制,计算方式为:
其中
这两类自注意力算子本质上都是集合算子,既可以在整个集合上作用(如句子、整幅图像),也可以只在局部子集上作用(如图像 patch)。
Point Transformer 层
点云天然就是不规则的集合,因此自注意力特别适合点云。Point Transformer 层基于向量自注意力,采用减法关系并在注意力分支和特征分支都加入位置编码:
其中
位置编码
位置编码让注意力能够感知局部空间结构。
在 NLP/图像中,常用正弦余弦或归一化坐标范围手工设计。
在 3D 点云中,点的坐标天然可用作位置编码。
本文提出 可训练的参数化位置编码:
其中
实验发现,位置编码对注意力生成分支和特征变换分支都很重要,因此在公式 (3) 的两个分支中都加了
Point Transformer 模块
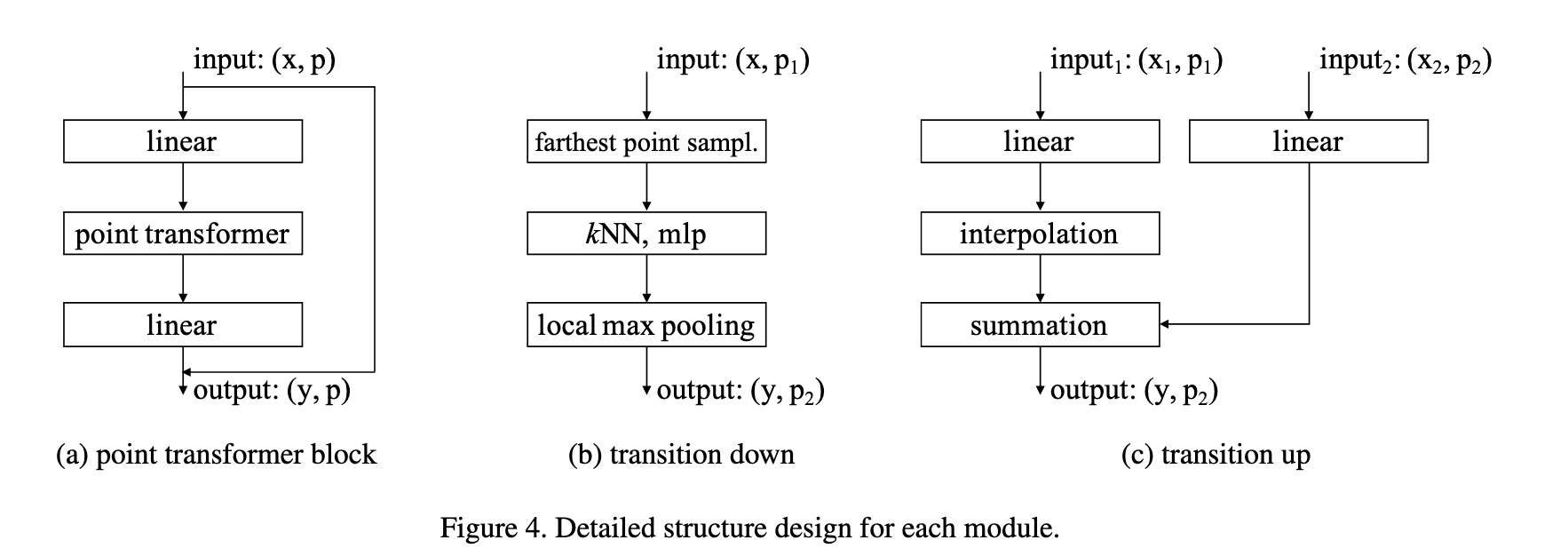
Point Transformer 模块是一个残差结构,如图4(a) 所示。它包含:
Point Transformer 层(核心)
降维的线性投影(加速计算)
残差连接
输入是一组点的特征向量及其 3D 坐标,输出是更新后的点特征。该模块在特征内容和三维空间布局上都能自适应进行信息聚合。
网络架构
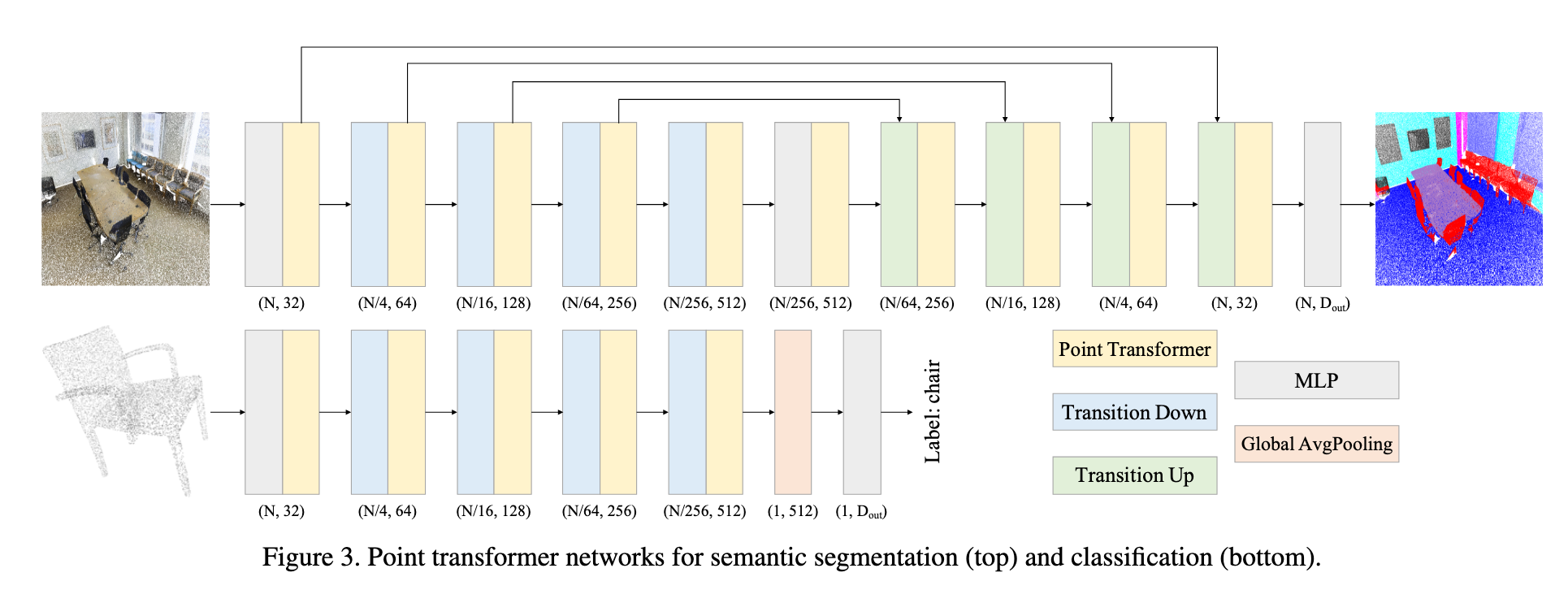
整个网络完全由 Point Transformer 模块、点级变换和池化组成,不依赖卷积。结构如图3所示。
骨干网络结构:
语义分割/分类的特征编码器有 5 个阶段,下采样率为
Transition down(图4b):
从
线性层 → BN → ReLU
kNN 聚合(
max pooling
Transition up(图4c):
在解码阶段,将
线性层 → BN → ReLU
三线性插值
融合来自编码器的跳跃连接特征
输出头:
语义分割:为每个点生成特征 → MLP → 每点分类 logits
分类任务:对点特征全局平均池化 → 全局特征向量 → MLP → 分类 logits
消融实验
为了验证 Point Transformer 设计中的关键选择,作者进行了多组消融实验,结果如下:
邻居数量 k 的影响:
当
当
当
Softmax 正则化的作用:
不使用 Softmax 时,mIoU/mAcc/OA = 66.5% / 72.8% / 89.3%。
使用 Softmax 时,性能显著提升至 70.4% / 76.5% / 90.8%。
结论:Softmax 归一化是必要的,否则模型性能显著下降。
位置编码 δ 的选择:
无位置编码 → 性能明显下降。
使用绝对位置编码 → 性能有所提升。
使用相对位置编码 → 性能最佳。
仅在注意力生成分支或特征变换分支单独加入相对位置编码 → 性能下降。
结论:必须在两条分支同时加入相对位置编码,效果最好。
注意力类型的比较:
MLP:逐点 MLP,无邻域交互,性能最差。
MLP+pooling:逐点 MLP + 邻域池化,有信息交互但无注意力机制,性能优于纯 MLP。
标量注意力:基于公式 (1),比前两者更强。
向量注意力:基于公式 (3),性能最优。
实验结果显示,标量注意力的 mIoU 为 64.6%,而向量注意力达到 70.4%,提升 5.8 个百分点。
结论:向量注意力由于支持逐通道自适应调制,表达能力更强,对 3D 数据处理尤为有利。
代码实现
向量自注意力层
PointTransformerLayer 类实现了Point Transformer论文中提出的向量自注意力机制,该机制是点云处理领域的重要创新。与传统的标量注意力不同,向量注意力能够更好地捕获3D空间中的几何关系。
核心设计理念:
向量化注意力:注意力权重不再是标量,而是向量形式,能够编码更丰富的空间信息
位置感知:通过位置编码函数θ将3D相对坐标信息融入注意力计算
局部邻域处理:基于KNN构建的局部邻域,实现高效的点云特征聚合
算法流程概述:
特征变换:将输入特征通过线性层生成Q、K、V三元组
邻域构建:利用KNN算法为每个点构建局部邻域
位置编码:将相对坐标通过MLP网络映射到高维特征空间
注意力计算:结合特征差值和位置编码生成向量化注意力权重
特征聚合:基于注意力权重对邻域特征进行加权融合
完整的向量自注意力计算代码实现如下:
class PointTransformerLayer(nn.Module):
def __init__(self, in_planes, out_planes, share_planes=8, nsample=16):
super().__init__()
# 中间通道数,简化处理(这里直接等于 out_planes)
self.mid_planes = mid_planes = out_planes // 1
self.out_planes = out_planes
self.share_planes = share_planes
self.nsample = nsample
# Q, K, V 的线性变换
self.linear_q = nn.Linear(in_planes, mid_planes) # 查询向量 (query)
self.linear_k = nn.Linear(in_planes, mid_planes) # 键向量 (key)
self.linear_v = nn.Linear(in_planes, out_planes) # 值向量 (value)
# 位置编码 δ (论文 Eq.(4): δ = θ(pi − pj))
# 输入是相对坐标 (3D),输出是与 out_planes 对齐的特征
self.linear_p = nn.Sequential(
nn.Linear(3, 3),
nn.BatchNorm1d(3),
nn.ReLU(inplace=True),
nn.Linear(3, out_planes)
)
# 权重生成函数 γ (MLP),作用在 (q - k + δ) 上
# 注意这里做了“通道分组”(share_planes),减少计算量
self.linear_w = nn.Sequential(
nn.BatchNorm1d(mid_planes),
nn.ReLU(inplace=True),
nn.Linear(mid_planes, mid_planes // share_planes),
nn.BatchNorm1d(mid_planes // share_planes),
nn.ReLU(inplace=True),
nn.Linear(mid_planes // share_planes, out_planes // share_planes)
)
# softmax 用来对注意力权重归一化
self.softmax = nn.Softmax(dim=1)
def forward(self, pxo) -> torch.Tensor:
# 输入:
# p: 点的坐标 (n, 3)
# x: 点的特征 (n, c)
# o: batch 索引 (b)
p, x, o = pxo
# 得到 Q, K, V
x_q, x_k, x_v = self.linear_q(x), self.linear_k(x), self.linear_v(x) # (n, c)
# 构建邻域 (kNN),并返回局部邻域的特征
# x_k: (n, nsample, 3+c),包含相对坐标和 K 特征
# x_v: (n, nsample, c),邻域内的 V 特征
x_k = pointops.queryandgroup(self.nsample, p, p, x_k, None, o, o, use_xyz=True)
x_v = pointops.queryandgroup(self.nsample, p, p, x_v, None, o, o, use_xyz=False)
# 分离相对坐标 p_r 和邻域内的 K 特征
p_r, x_k = x_k[:, :, 0:3], x_k[:, :, 3:]
# 将相对坐标 p_r 输入位置编码 MLP θ
# 这里因为 BatchNorm 的维度问题,需要转置 (n, nsample, 3) ↔ (n, 3, nsample)
for i, layer in enumerate(self.linear_p):
p_r = layer(p_r.transpose(1, 2).contiguous()).transpose(1, 2).contiguous() if i == 1 else layer(p_r)
# 经过 MLP 后: (n, nsample, out_planes)
# 根据 Eq.(3): w = γ(φ(xi) − ψ(xj) + δ)
# x_q.unsqueeze(1): (n, 1, c),与邻域对齐
# p_r reshape 后与 x_k 对齐做相加
w = x_k - x_q.unsqueeze(1) + p_r.view(
p_r.shape[0], p_r.shape[1], self.out_planes // self.mid_planes, self.mid_planes
).sum(2) # (n, nsample, c)
# 将 w 输入 γ MLP (linear_w),得到注意力权重
for i, layer in enumerate(self.linear_w):
w = layer(w.transpose(1, 2).contiguous()).transpose(1, 2).contiguous() if i % 3 == 0 else layer(w)
# softmax 归一化注意力权重
w = self.softmax(w) # (n, nsample, c)
# 最终聚合 (Eq.(3) 中 ρ(...)*α(xj+δ))
n, nsample, c = x_v.shape
s = self.share_planes
x = ((x_v + p_r).view(n, nsample, s, c // s) * w.unsqueeze(2)).sum(1).view(n, c)
return x下面针对上面部分代码进行进一步说明:
- 计算注意力权重: 领域内最近邻键特征 - 领域所在中心点查询特征 + 相对位置编码(巧妙的view方式,个人理解是为了确保维度对齐)
w = x_k - x_q.unsqueeze(1) + p_r.view(
p_r.shape[0], p_r.shape[1], self.out_planes // self.mid_planes, self.mid_planes
).sum(2) # (n, nsample, c)- 聚合: 对每个中心点的所有邻居点的特征在特征维度上进行分组,做通道分组(类似多头注意力,但是作用不完全相同) + 利用广播后做逐元素相乘,完成对同一个邻居点的所有通道分组应用相同权重分配的过程 + 所有邻居点特征进行求和,完成领域值信息聚合过程 + 多头重组回原貌
# (200,8,8,4) * (200,8,1,4) -> (200, 8, 8, 4) -> (200,8,4) -> (200,32)
x = ((x_v + p_r).view(n, nsample, s, c // s) * w.unsqueeze(2)).sum(1).view(n, c)分组计算过程可参考如下这个简化版例子:
# 分组后的特征 (1个点,1个邻居,2组,每组2个通道)
grouped_features = torch.tensor([[
[[1.0, 2.0], # 组0: 通道0,1
[3.0, 4.0]] # 组1: 通道2,3
]]) # shape: (1, 1, 2, 2)
# 注意力权重 (16维权重,这里简化为2维)
attention_weights = torch.tensor([[
[[0.5, 1.0]] # 权重向量
]]) # shape: (1, 1, 1, 2)
# 逐元素相乘
result = grouped_features * attention_weights
# [[[[1.0*0.5, 2.0*1.0], # 组0: [0.5, 2.0]
# [3.0*0.5, 4.0*1.0]]]] # 组1: [1.5, 4.0]这实际上是一种分组通道注意力(Grouped Channel Attention):
不是在序列维度上做注意力(token-token)
而是在通道维度上做注意力(channel-channel)
通过分组实现参数共享
queryandgroup 方法实现了点云的邻域查询和特征分组功能。具体流程如下:
邻域查询:对于查询点集合中的每个点,利用
KNN算法在所有点集合中寻找最近的nsample个邻居点,并返回这些邻居点的索引;相对坐标计算:将每个查询点的邻居点坐标减去查询点自身坐标,得到以查询点为原点的局部相对坐标系;
特征分组:根据邻居点索引,提取对应的特征向量,形成每个查询点的邻域特征集合。
该方法的核心作用是将无序的点云数据转换为有序的局部邻域结构,为后续的注意力计算提供空间上下文信息。完整代码实现如下所示:
def queryandgroup(nsample, xyz, new_xyz, feat, idx, offset, new_offset, use_xyz=True):
"""
查询并分组函数:为每个查询点找到最近邻并分组其特征
input:
nsample: 最近邻数量
xyz: 所有点的坐标 (n, 3)
new_xyz: 查询点的坐标 (m, 3)
feat: 所有点的特征 (n, c)
idx: 预计算的最近邻索引,如果为None则重新计算
offset: 每个batch的点的结束索引 (b)
new_offset: 每个batch的查询点的结束索引 (b)
use_xyz: 是否在输出中包含相对坐标信息
output:
new_feat: 分组后的特征,如果use_xyz=True则为(m, nsample, 3+c),否则为(m, nsample, c)
grouped_idx: 分组后的索引 (m, nsample)
"""
assert xyz.is_contiguous() and new_xyz.is_contiguous() and feat.is_contiguous()
# 如果没有指定查询点,则使用所有点作为查询点
if new_xyz is None:
new_xyz = xyz
# 如果没有提供预计算的索引,则调用KNN查询函数计算
if idx is None:
idx, _ = knnquery(nsample, xyz, new_xyz, offset, new_offset) # (m, nsample)
n, m, c = xyz.shape[0], new_xyz.shape[0], feat.shape[1]
# 根据索引分组坐标:获取每个查询点的邻居坐标
grouped_xyz = xyz[idx.view(-1).long(), :].view(m, nsample, 3) # (m, nsample, 3)
# 计算相对坐标:邻居坐标减去查询点坐标(局部坐标系): (200,8,3) - (200,1,3)= ( 200,8,3 )
grouped_xyz -= new_xyz.unsqueeze(1) # (m, nsample, 3)
# 根据索引分组特征:获取每个查询点的邻居特征
grouped_feat = feat[idx.view(-1).long(), :].view(m, nsample, c) # (m, nsample, c)
# 根据use_xyz标志决定输出格式
if use_xyz:
# 拼接相对坐标和特征:输出形状为(m, nsample, 3+c)
return torch.cat((grouped_xyz, grouped_feat), -1)
else:
# 只返回特征:输出形状为(m, nsample, c)
return grouped_featKNNQuery 类实现了K近邻查询算法,其主要功能是为每个查询点寻找最近的邻居点。具体实现包含以下几个关键步骤:
1. 问题背景:在批处理点云数据时,不同样本的点云可能包含不同数量的点(如第一个点云1024个点,第二个点云2048个点),因此需要使用 offset 和 new_offset 参数来标记每个batch中点云的边界范围。
2. 算法流程:
对于每个查询点,计算其与当前batch内所有候选点的欧几里得距离
使用
torch.topk函数选出距离最小的nsample个点返回最近邻点的索引和对应的距离值
3. 实现特点:采用批处理方式提高计算效率,同时处理点云数量不一致的情况。完整代码实现如下:
class KNNQuery(Function):
@staticmethod
def forward(ctx, nsample, xyz, new_xyz, offset, new_offset):
"""
KNN查询的前向传播函数
input:
nsample: 需要查询的最近邻数量
xyz: 所有点的坐标 (n, 3)
new_xyz: 查询点的坐标 (m, 3),如果为None则使用xyz
offset: 每个batch的点的结束索引 (b)
new_offset: 每个batch的查询点的结束索引 (b)
output:
idx: 每个查询点的最近邻点索引 (m, nsample)
dist2: 每个查询点到最近邻点的平方距离 (m, nsample)
"""
if new_xyz is None:
new_xyz = xyz # 如果没有指定查询点,则对所有点进行自查询
assert xyz.is_contiguous() and new_xyz.is_contiguous()
m = new_xyz.shape[0] # 查询点的数量
# 初始化输出张量:索引矩阵和距离矩阵
idx = torch.zeros((m, nsample), dtype=torch.long)
dist2 = torch.zeros((m, nsample))
# 按batch处理数据
start_idx, new_start_idx = 0, 0 # 当前batch的起始索引
for i in range(len(offset)):
# 计算当前batch的结束索引
end_idx = offset[i] if i < len(offset) else xyz.shape[0]
new_end_idx = new_offset[i] if i < len(new_offset) else m
# 确保当前batch有数据需要处理
if end_idx > start_idx and new_end_idx > new_start_idx:
# 提取当前batch的点坐标和查询点坐标
batch_xyz = xyz[start_idx:end_idx]
batch_new_xyz = new_xyz[new_start_idx:new_end_idx]
# 计算查询点与所有点之间的欧几里得距离平方
# 使用广播机制计算坐标差: (1,n,3) - (m,1,3) = (m,n,3) - (m,n,3) = (m_batch, n_batch, 3)
diff = batch_xyz.unsqueeze(0) - batch_new_xyz.unsqueeze(1)
# (m_batch, n_batch) - 平方距离矩阵
distances = torch.sum(diff ** 2, dim=-1)
# 获取k个最近邻的索引和距离
actual_nsample = min(nsample, distances.shape[1]) # 实际可用的最近邻数量
# torch.topk返回最小的k个值及其索引: (m_batch,actual_nsample)
knn_dist, knn_idx = torch.topk(distances, actual_nsample, dim=1, largest=False)
# 如果实际邻居数量小于要求的nsample,进行填充
if actual_nsample < nsample:
# 使用0填充索引和距离矩阵
padding = torch.zeros((knn_idx.shape[0], nsample - actual_nsample), dtype=knn_idx.dtype)
knn_idx = torch.cat([knn_idx, padding], dim=1)
knn_dist = torch.cat(
[knn_dist, torch.zeros((knn_dist.shape[0], nsample - actual_nsample), dtype=knn_dist.dtype)],
dim=1)
# 将当前batch的结果存入总输出中,注意加上全局偏移量
idx[new_start_idx:new_end_idx] = knn_idx + start_idx
dist2[new_start_idx:new_end_idx] = knn_dist
# 更新下一个batch的起始索引
start_idx, new_start_idx = end_idx, new_end_idx
# 返回最近邻索引和实际距离(加上小常数避免数值不稳定)
return idx, torch.sqrt(dist2 + 1e-8)Point Transformer 残差块
PointTransformerBlock 类是 Point Transformer 残差块,是 Point Transformer 架构中的基本构建模块 , 其代码实现如下所示:
class PointTransformerBlock(nn.Module):
"""
Point Transformer 残差块
实现预激活(Pre-Activation)的残差连接结构
"""
expansion = 1 # 维度扩展系数,1表示输出维度与输入维度相同
def __init__(self, in_planes, planes, share_planes=8, nsample=16):
"""
初始化函数
Args:
in_planes: 输入特征维度
planes: 中间特征维度(也是输出维度,因为expansion=1)
share_planes: 通道分组数,用于减少计算量
nsample: 每个点的邻居数量,用于kNN搜索
"""
super(PointTransformerBlock, self).__init__()
# 第一层:线性变换 + 批归一化(升维或保持维度)
self.linear1 = nn.Linear(in_planes, planes, bias=False) # 无偏置,因为后面有BN
self.bn1 = nn.BatchNorm1d(planes) # 批归一化,加速训练
# 核心:Point Transformer 自注意力层
self.transformer2 = PointTransformerLayer(planes, planes, share_planes, nsample)
self.bn2 = nn.BatchNorm1d(planes) # Transformer后的批归一化
# 第三层:线性变换 + 批归一化(调整到最终输出维度)
self.linear3 = nn.Linear(planes, planes * self.expansion, bias=False)
self.bn3 = nn.BatchNorm1d(planes * self.expansion) # 最终批归一化
# 激活函数(原地操作节省内存)
self.relu = nn.ReLU(inplace=True)
# 注意:这里应该有残差连接的shortcut处理
# 如果 in_planes != planes * expansion,需要投影层
if in_planes != planes * self.expansion:
self.shortcut = nn.Sequential(
nn.Linear(in_planes, planes * self.expansion, bias=False),
nn.BatchNorm1d(planes * self.expansion)
)
else:
self.shortcut = nn.Identity() # 恒等映射
def forward(self, pxo):
"""
前向传播
Args:
pxo: 元组 (p, x, o)
p: 点坐标,形状 (n, 3)
x: 点特征,形状 (n, in_planes)
o: 批次索引,形状 (b)
Returns:
元组 (p, x, o): 变换后的点坐标、特征和批次索引
"""
p, x, o = pxo # 解包:点坐标, 点特征, batch索引
# 保存原始输入用于残差连接(需要处理维度匹配)
identity = x
# 第一层:线性变换 → BN → ReLU
x = self.linear1(x) # (n, in_planes) → (n, planes)
x = self.bn1(x) # 批归一化
x = self.relu(x) # ReLU激活
# 第二层:Point Transformer 自注意力 → BN → ReLU
x = self.transformer2([p, x, o]) # 应用自注意力,形状 (n, planes)
x = self.bn2(x) # 批归一化
x = self.relu(x) # ReLU激活
# 第三层:线性变换 → BN
x = self.linear3(x) # (n, planes) → (n, planes * expansion)
x = self.bn3(x) # 最终批归一化
# 残差连接:处理维度匹配问题
identity = self.shortcut(identity) # 如果需要,投影到相同维度
# 残差连接 + 激活
x += identity # 添加残差连接
x = self.relu(x) # 最终ReLU激活
# 返回相同格式的数据
return [p, x, o]下采样层
TransitionDown层的主要作用是在点云处理中进行层次化的特征学习和分辨率降低,类似于CNN中的下采样层(如池化层),但专门为点云数据设计。
- 降低点云分辨率(当stride≠1时)
# 输入: 1000个点 → 输出: 500个点(stride=2时)
# 通过最远点采样选择最具代表性的点 subset- 增加特征维度
# 输入: 64维特征 → 输出: 128维特征
# 扩展每个点的特征表达能力- 聚合局部信息
# 为每个采样点聚合其邻域内的特征信息
# 使用最大池化提取最显著的特征- 保持几何结构
# 下采样后的点云仍然保持原始点云的几何形状
# 最远点采样确保点分布均匀相当于CNN中的:
MaxPooling(降低分辨率)
Conv1x1(增加通道数)
局部感受野(聚合邻域信息)
的三合一操作,但专门为无序、不规则的点云数据设计。 通常用在层次化架构中:
高分辨率 → TransitionDown → 中分辨率 → TransitionDown → 低分辨率
很多点 ↓ 中等点 ↓ 少量点
浅层特征 ↓ 中层特征 ↓ 深层特征完整代码实现如下:
class TransitionDown(nn.Module):
"""
点云下采样过渡层
功能:降低点云分辨率同时增加特征维度,保持批处理信息
"""
def __init__(self, in_planes, out_planes, stride=1, nsample=16):
"""
初始化下采样层
Args:
in_planes: 输入特征维度
out_planes: 输出特征维度
stride: 下采样步长(stride=1表示无下采样,只做特征变换)
nsample: 邻域采样点数,用于局部特征聚合
"""
super().__init__()
self.stride = stride # 下采样率
self.nsample = nsample # 邻域采样数
if stride != 1:
# 下采样模式:需要处理坐标和特征,输出维度为3+in_planes
self.linear = nn.Linear(3 + in_planes, out_planes, bias=False) # 无偏置,因为后面有BN
self.pool = nn.MaxPool1d(nsample) # 最大池化,聚合邻域特征
else:
# 无下采样模式:只做特征变换
self.linear = nn.Linear(in_planes, out_planes, bias=False)
# 共享的批归一化和激活函数
self.bn = nn.BatchNorm1d(out_planes) # 批归一化
self.relu = nn.ReLU(inplace=True) # ReLU激活函数(原地操作节省内存)
def forward(self, pxo):
"""
前向传播
Args:
pxo: 元组 (p, x, o)
p: 点坐标,形状 (n, 3)
x: 点特征,形状 (n, in_planes)
o: 批次索引,形状 (b) - 每个元素表示该批次点的结束索引
Returns:
元组 (p, x, o): 下采样后的点坐标、特征和批次索引
"""
p, x, o = pxo # 解包:点坐标, 点特征, 批次索引
if self.stride != 1:
# ==================== 下采样模式 ====================
# 计算下采样后的批次索引 n_o
n_o, count = [o[0].item() // self.stride], o[0].item() // self.stride
for i in range(1, o.shape[0]):
# 计算每个批次下采样后的点数
count += (o[i].item() - o[i-1].item()) // self.stride
n_o.append(count)
n_o = torch.IntTensor(n_o).to(o.device) # 转换为张量并保持设备一致
# 1. 最远点采样:从原始点云中选择代表性点
idx = pointops.furthestsampling(p, o, n_o) # (m) - 采样点索引,m为下采样后的点数
n_p = p[idx.long(), :] # (m, 3) - 下采样后的点坐标
# 2. 查询和分组:为每个采样点找到邻域并聚合特征
# 输出形状: (m, 3 + in_planes, nsample)
# 包含:相对坐标(3) + 原始特征(in_planes)
x = pointops.queryandgroup(self.nsample, p, n_p, x, None, o, n_o, use_xyz=True)
# 3. 线性变换 + BN + ReLU
# 先将特征维度转到最后: (m, 3+c, nsample) → (m, nsample, 3+c)
x = self.linear(x.transpose(1, 2).contiguous()) # (m, nsample, out_planes)
x = self.bn(x.transpose(1, 2).contiguous()) # (m, out_planes, nsample) - BN要求通道维度在前
x = self.relu(x) # ReLU激活
# 4. 最大池化:在邻域维度上池化,得到每个点的最终特征
x = self.pool(x) # (m, out_planes, 1) - 沿nsample维度池化
x = x.squeeze(-1) # (m, out_planes) - 移除最后一个维度
# 更新点和批次信息
p, o = n_p, n_o # 使用下采样后的点坐标和批次索引
else:
# ==================== 无下采样模式 ====================
# 只进行特征变换:Linear → BN → ReLU
x = self.linear(x) # (n, in_planes) → (n, out_planes)
x = self.bn(x) # 批归一化
x = self.relu(x) # ReLU激活
# 返回相同格式的数据
return [p, x, o]最远点采样(FPS)算法:
初始化:随机选择一个起始点
迭代选择:
计算所有点到已选点集的最小距离
选择距离最大的点(即最远的点)
重复直到选择足够多的点
class FurthestSampling(Function):
"""
最远点采样(Farthest Point Sampling)的自定义PyTorch函数
用于从点云中选择分布最均匀的点的子集
"""
@staticmethod
def forward(ctx, xyz, offset, new_offset):
"""
前向传播:执行最远点采样算法
Args:
ctx: 上下文对象,用于存储反向传播需要的信息
xyz: 输入点云坐标,形状为 (n, 3),需要是内存连续的
offset: 原始批次索引,形状为 (b),每个元素表示该批次点的结束位置
new_offset: 目标批次索引,形状为 (b),每个元素表示下采样后该批次点的结束位置
Returns:
idx: 采样点的索引,形状为 (m),其中 m = new_offset[-1]
"""
# 确保输入张量是内存连续的
assert xyz.is_contiguous()
n, b = xyz.shape[0], offset.shape[0] # n: 总点数, b: 批次数
# 创建输出索引张量,大小为下采样后的总点数
idx = torch.zeros(new_offset[b-1].item(), dtype=torch.long, device=xyz.device)
# CPU实现的最远点采样算法
start_idx = 0 # 当前批次的起始索引
result_idx = 0 # 结果中的当前写入位置
# 遍历每个批次
for i in range(b):
# 计算当前批次的结束索引
end_idx = offset[i] if i < b else n
batch_size = end_idx - start_idx # 当前批次的点数
if batch_size > 0:
# 创建选择标记数组,初始全为False
selected = torch.zeros(batch_size, dtype=torch.bool, device=xyz.device)
# 随机选择第一个点(这里固定选择第一个点)
selected[0] = True
# 初始化距离数组,存储每个点到已选点集的最小距离
dist = torch.full((batch_size,), float('inf'), device=xyz.device)
# 计算当前批次需要采样的点数
if i == 0:
num_to_sample = new_offset[i].item() # 第一个批次
else:
num_to_sample = new_offset[i].item() - new_offset[i-1].item() # 后续批次
# 执行最远点采样迭代
for j in range(1, min(batch_size, num_to_sample)):
# 更新距离:计算所有点到最新选中点的距离,并取最小值
last_selected = torch.where(selected)[0][-1] # 最后一个选中的点
new_dist = torch.sum((batch_xyz - batch_xyz[last_selected]) ** 2, dim=1) # 计算欧氏距离平方
dist = torch.minimum(dist, new_dist) # 保持每个点的最小距离
# 选择距离最大的点(离已选点集最远的点)
next_point = torch.argmax(dist)
selected[next_point] = True # 标记为已选
dist[next_point] = 0 # 将该点的距离设为0,避免重复选择
# 存储选中的索引(需要加上批次的起始偏移)
selected_indices = torch.where(selected)[0] + start_idx
idx[result_idx:result_idx + len(selected_indices)] = selected_indices
result_idx += len(selected_indices)
# 移动到下一个批次
start_idx = end_idx
return idx上采样层
TransitionUp层的主要作用是在点云处理中恢复分辨率并融合多尺度特征,类似于CNN中的上采样层(如转置卷积),但专门为点云数据设计。
- 恢复点云分辨率
# 将低分辨率特征上采样到高分辨率
# 输入: 500个点 → 输出: 1000个点(分辨率恢复)- 多尺度特征融合
# 融合编码器(深层抽象特征)和解码器(浅层细节特征)
# 结合高层语义信息和底层几何细节- 特征增强
# 通过全局上下文信息增强局部特征
# 每个点都能感知整个点云的全局信息- 构建解码器路径
# 在U-Net类架构中逐步恢复空间分辨率
# 同时保持丰富的特征表示两种工作模式:
- 模式1:全局特征增强(无跳跃连接)
当前层特征 → 计算全局平均特征 → 与每个点特征拼接 → 增强表示- 模式2:跳跃连接融合(有跳跃连接)
当前层特征 + 上采样的编码器特征 → 融合 → 输出通常用在解码器中,与编码器的TransitionDown对应:
编码器: 高分辨率 → TransitionDown → 中分辨率 → TransitionDown → 低分辨率
解码器: 低分辨率 → TransitionUp → 中分辨率 → TransitionUp → 高分辨率相当于CNN中的:
转置卷积/上采样(恢复分辨率)
跳跃连接(融合多尺度特征)
注意力机制(引入全局上下文)
的组合操作,但专门为点云数据设计; 完整代码实现如下所示:
class TransitionUp(nn.Module):
"""
点云上采样过渡层
功能:恢复点云分辨率并融合不同层级的特征,实现特征上采样
类似于CNN中的上采样/转置卷积层,但专为点云设计
"""
def __init__(self, in_planes, out_planes=None):
"""
初始化上采样层
Args:
in_planes: 输入特征维度
out_planes: 输出特征维度(如果为None,则输出维度与输入相同)
"""
super().__init__()
if out_planes is None:
# 模式1:输出维度与输入相同(通常用于解码器中间层)
self.linear1 = nn.Sequential(
nn.Linear(2 * in_planes, in_planes), # 将拼接后的特征映射回原维度
nn.BatchNorm1d(in_planes), # 批归一化
nn.ReLU(inplace=True) # ReLU激活
)
self.linear2 = nn.Sequential(
nn.Linear(in_planes, in_planes), # 全局特征变换
nn.ReLU(inplace=True) # ReLU激活
)
else:
# 模式2:改变输出维度(通常用于连接编码器和解码器)
self.linear1 = nn.Sequential(
nn.Linear(out_planes, out_planes), # 恒等映射变换
nn.BatchNorm1d(out_planes), # 批归一化
nn.ReLU(inplace=True) # ReLU激活
)
self.linear2 = nn.Sequential(
nn.Linear(in_planes, out_planes), # 维度变换
nn.BatchNorm1d(out_planes), # 批归一化
nn.ReLU(inplace=True) # ReLU激活
)
def forward(self, pxo1, pxo2=None):
"""
前向传播:两种模式
Mode 1 (pxo2 is None): 仅使用全局特征增强当前层特征
Mode 2 (pxo2 provided): 跳跃连接 - 融合深层特征和浅层特征
Args:
pxo1: 元组 (p, x, o) - 当前层的点坐标、特征、批次索引
pxo2: 元组 (p, x, o) - 跳跃连接来自编码器的点坐标、特征、批次索引(可选)
Returns:
x: 上采样后的特征,形状与pxo1中的特征相同或变换后的维度
"""
if pxo2 is None:
# ==================== 模式1:全局特征增强 ====================
# 仅使用当前层特征进行自增强(无跳跃连接)
_, x, o = pxo1 # 解包:忽略坐标,只取特征和批次索引
x_tmp = [] # 存储处理后的每个批次特征
# 按批次处理
for i in range(o.shape[0]):
# 计算当前批次的起始、结束索引和点数
if i == 0:
s_i, e_i, cnt = 0, o[0].item(), o[0].item() # 第一个批次
else:
s_i, e_i = o[i-1].item(), o[i].item() # 后续批次
cnt = e_i - s_i # 当前批次点数
# 提取当前批次的特征
x_b = x[s_i:e_i, :] # (cnt, in_planes)
# 计算全局平均特征并变换
global_feat = x_b.sum(0, keepdim=True) / cnt # (1, in_planes) - 批次平均特征
transformed_global = self.linear2(global_feat) # (1, in_planes) - 变换后的全局特征
# 将全局特征复制到每个点,并与原始特征拼接
x_b = torch.cat((x_b, transformed_global.repeat(cnt, 1)), dim=1) # (cnt, 2*in_planes)
x_tmp.append(x_b)
# 合并所有批次
x = torch.cat(x_tmp, 0) # (n, 2*in_planes)
# 最终变换:降维 + 激活
x = self.linear1(x) # (n, in_planes)
else:
# ==================== 模式2:跳跃连接特征融合 ====================
# 融合编码器(深层)和解码器(浅层)的特征
p1, x1, o1 = pxo1 # 当前层(解码器):通常分辨率更高
p2, x2, o2 = pxo2 # 跳跃连接层(编码器):通常特征更抽象
# 处理当前层特征
x1_transformed = self.linear1(x1) # (n1, out_planes)
# 处理跳跃连接特征并进行上采样(插值)
x2_transformed = self.linear2(x2) # (n2, out_planes)
# 将深层特征上采样到浅层分辨率:通过点云插值
# 将p2位置的特征插值到p1位置
x2_upsampled = pointops.interpolation(p2, p1, x2_transformed, o2, o1)
# 特征融合:当前层特征 + 上采样的编码器特征
x = x1_transformed + x2_upsampled # 逐元素相加
return x该插值流程就是:对每个目标点,找到源点云的 k 个最近邻 → 根据反距离加权分配权重 → 用邻居特征加权求和 → 得到目标点特征。
def interpolation(xyz, new_xyz, feat, offset, new_offset, k=3):
"""
点云特征插值函数(基于 KNN + 反距离加权)
Args:
xyz: (m, 3) 源点云坐标(低分辨率点云,比如 encoder 输出)
new_xyz: (n, 3) 目标点云坐标(高分辨率点云,比如 decoder 对应层)
feat: (m, c) 源点云的特征
offset: (b) 每个 batch 的点数累积和(源点云)
new_offset: (b) 每个 batch 的点数累积和(目标点云)
k: int,插值时选取的近邻点个数(默认3)
Returns:
new_feat: (n, c),插值到目标点上的特征
"""
# 确保输入 tensor 在内存中是连续存放的,提高计算效率
assert xyz.is_contiguous() and new_xyz.is_contiguous() and feat.is_contiguous()
# 在源点云 xyz 中,查找目标点云 new_xyz 的 k 个最近邻
# idx: (n, k) 最近邻点索引
# dist: (n, k) 最近邻点对应的欧氏距离
idx, dist = knnquery(k, xyz, new_xyz, offset, new_offset) # (n, 3), (n, 3)
# 计算距离的倒数,避免除零加一个小量
dist_recip = 1.0 / (dist + 1e-8) # (n, k)
# 对权重进行归一化,使每个点的权重和为 1
norm = torch.sum(dist_recip, dim=1, keepdim=True) # (n, 1)
weight = dist_recip / norm # (n, k)
# 初始化插值后的特征 (n, c),全零
new_feat = torch.zeros((new_xyz.shape[0], feat.shape[1]), dtype=feat.dtype)
# 遍历每个近邻点(这里默认 k=3)
for i in range(k):
indices = idx[:, i].long() # 第 i 个邻居的索引
# 有效性检查:确保索引在合法范围内
valid_mask = (indices >= 0) & (indices < feat.shape[0])
if valid_mask.any():
# 对有效邻居点:加权累加特征
# feat[indices] : (n, c) 邻居点特征
# weight[:, i].unsqueeze(-1) : (n, 1) 权重
# → 逐点乘法,最后累加到 new_feat
new_feat[valid_mask] += feat[indices[valid_mask], :] * weight[valid_mask, i].unsqueeze(-1)
return new_featPoint Transformer 主模型
class PointTransformerSeg(nn.Module):
"""
Point Transformer 用于点云语义分割的网络
采用编码器-解码器结构(类似 U-Net),
编码器用于下采样和提取抽象特征,
解码器用于上采样和特征融合,最终输出每个点的类别概率。
"""
def __init__(self, block, blocks, c=6, k=13):
"""
Args:
block: 点变换模块类型(Point Transformer Block)
blocks: 每一层包含 block 数量列表
c: 输入点特征维度(通常是 xyz + 额外特征)
k: 分类类别数量
"""
super().__init__()
self.c = c
self.in_planes, planes = c, [32, 64, 128, 256, 512] # 编码器各层输出通道
fpn_planes, fpnhead_planes, share_planes = 128, 64, 8
stride, nsample = [1, 4, 4, 4, 4], [8, 16, 16, 16, 16] # 下采样比例与邻居点数
# ========== 编码器 ==========
# enc1: 分辨率 N/1
self.enc1 = self._make_enc(block, planes[0], blocks[0], share_planes, stride=stride[0], nsample=nsample[0])
# enc2: 分辨率 N/4
self.enc2 = self._make_enc(block, planes[1], blocks[1], share_planes, stride=stride[1], nsample=nsample[1])
# enc3: 分辨率 N/16
self.enc3 = self._make_enc(block, planes[2], blocks[2], share_planes, stride=stride[2], nsample=nsample[2])
# enc4: 分辨率 N/64
self.enc4 = self._make_enc(block, planes[3], blocks[3], share_planes, stride=stride[3], nsample=nsample[3])
# enc5: 分辨率 N/256
self.enc5 = self._make_enc(block, planes[4], blocks[4], share_planes, stride=stride[4], nsample=nsample[4])
# ========== 解码器 ==========
# dec5: 解码器最深层,转换 p5 特征(is_head=True 表示输出头,不进行 skip 融合)
self.dec5 = self._make_dec(block, planes[4], 2, share_planes, nsample=nsample[4], is_head=True)
# dec4: 融合 p5 与 p4
self.dec4 = self._make_dec(block, planes[3], 2, share_planes, nsample=nsample[3])
# dec3: 融合 p4 与 p3
self.dec3 = self._make_dec(block, planes[2], 2, share_planes, nsample=nsample[2])
# dec2: 融合 p3 与 p2
self.dec2 = self._make_dec(block, planes[1], 2, share_planes, nsample=nsample[1])
# dec1: 融合 p2 与 p1
self.dec1 = self._make_dec(block, planes[0], 2, share_planes, nsample=nsample[0])
# 分类头:每个点输出 k 个类别得分
self.cls = nn.Sequential(
nn.Linear(planes[0], planes[0]),
nn.BatchNorm1d(planes[0]),
nn.ReLU(inplace=True),
nn.Linear(planes[0], k)
)
# ========== 构建编码器层 ==========
def _make_enc(self, block, planes, blocks, share_planes=8, stride=1, nsample=16):
layers = []
# TransitionDown: 点云下采样 + 特征升维
layers.append(TransitionDown(self.in_planes, planes * block.expansion, stride, nsample))
self.in_planes = planes * block.expansion
# 后续 block 叠加处理下采样后的特征
for _ in range(1, blocks):
layers.append(block(self.in_planes, self.in_planes, share_planes, nsample=nsample))
return nn.Sequential(*layers)
# ========== 构建解码器层 ==========
def _make_dec(self, block, planes, blocks, share_planes=8, nsample=16, is_head=False):
layers = []
# TransitionUp: 点云上采样 + 特征融合
# is_head=True 时表示输出层,不进行 skip 融合
layers.append(TransitionUp(self.in_planes, None if is_head else planes * block.expansion))
self.in_planes = planes * block.expansion
# 后续 block 叠加处理上采样后的特征
for _ in range(1, blocks):
layers.append(block(self.in_planes, self.in_planes, share_planes, nsample=nsample))
return nn.Sequential(*layers)
# ========== 前向传播 ==========
def forward(self, pxo):
"""
Args:
pxo: tuple (p0, x0, o0)
p0: (n,3) 点坐标
x0: (n,c) 点特征
o0: (b) 每个 batch 的点累积偏移
Returns:
x: (n,k) 每个点的类别预测
"""
p0, x0, o0 = pxo
# 如果输入特征只有 xyz,直接使用 p0,否则拼接额外特征
x0 = p0 if self.c == 3 else torch.cat((p0, x0), 1)
# ================= 编码器 =================
p1, x1, o1 = self.enc1([p0, x0, o0])
p2, x2, o2 = self.enc2([p1, x1, o1])
p3, x3, o3 = self.enc3([p2, x2, o2])
p4, x4, o4 = self.enc4([p3, x3, o3])
p5, x5, o5 = self.enc5([p4, x4, o4])
# ================= 解码器 =================
# 注意 decX[0] 是 TransitionUp,上采样层
# decX[1:] 是 Point Transformer Block,处理上采样后的特征
x5 = self.dec5[1:]([p5, self.dec5[0]([p5, x5, o5]), o5])[1]
x4 = self.dec4[1:]([p4, self.dec4[0]([p4, x4, o4], [p5, x5, o5]), o4])[1]
x3 = self.dec3[1:]([p3, self.dec3[0]([p3, x3, o3], [p4, x4, o4]), o3])[1]
x2 = self.dec2[1:]([p2, self.dec2[0]([p2, x2, o2], [p3, x3, o3]), o2])[1]
x1 = self.dec1[1:]([p1, self.dec1[0]([p1, x1, o1], [p2, x2, o2]), o1])[1]
# ================= 分类头 =================
x = self.cls(x1) # 输出每个点的 k 类得分
return x切片 self.dec5[1:] : 在 Python 中,nn.Sequential 支持切片操作,返回的是 新的 nn.Sequential 对象,而不是元组。