
简析PointNet网络模型及其背后原理
简析PointNet
论文: https://arxiv.org/abs/1612.00593
TensorFlow 版本代码: https://github.com/charlesq34/pointnet
Pytorch 版本代码: https://github.com/fxia22/pointnet.pytorch
核心
问题背景: 点云是三维几何数据的一种重要表示形式,但由于其无序性和非规则性,传统卷积神经网络难以直接处理。
❌ 传统方法的缺陷 :
- 将点云转换为体素网格(voxel grid)或图像视图(multi-view rendering), 这些方法会导致信息损失、计算量大、不灵活等问题。
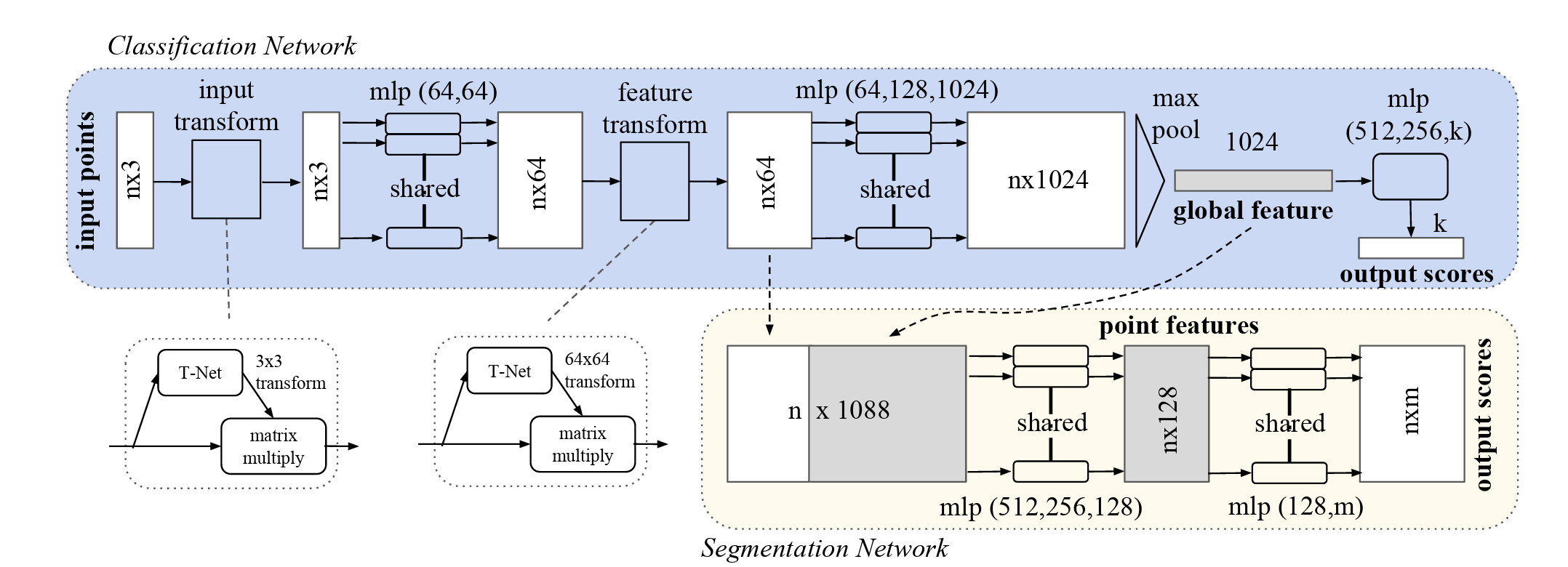
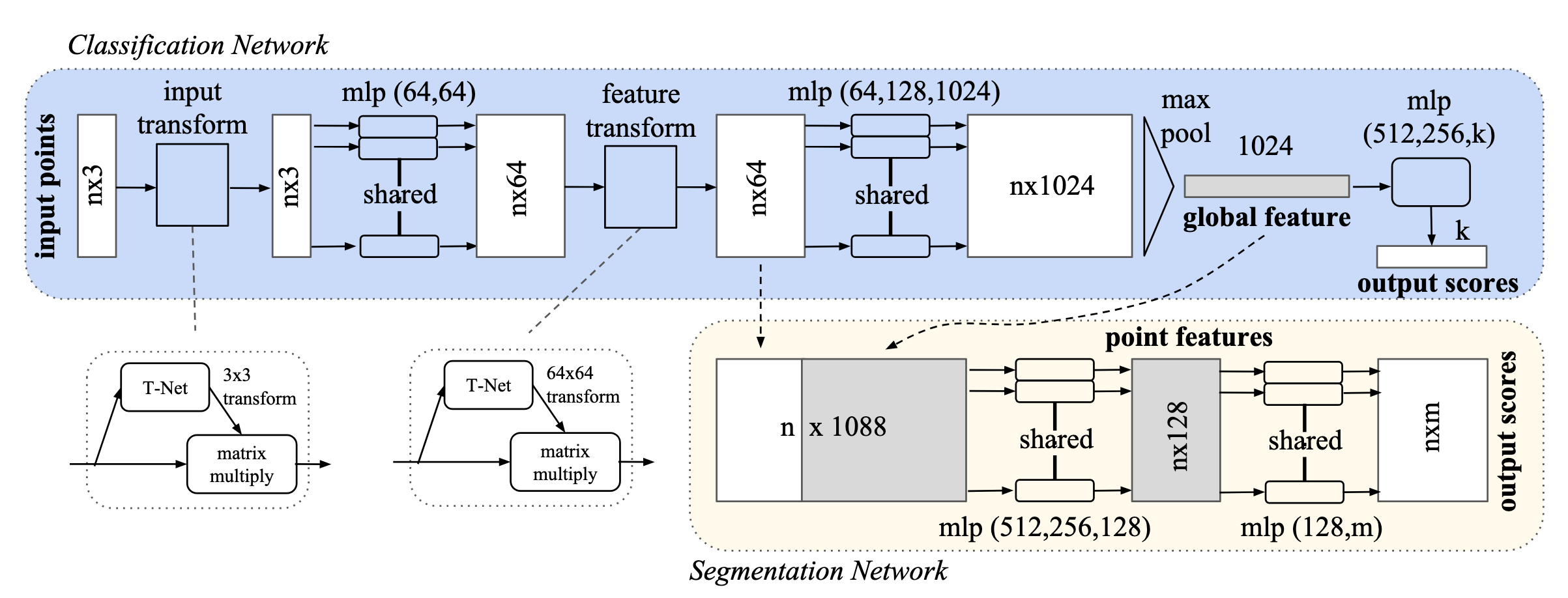
🌟 PointNet 的创新点 :
- 直接以点集作为输入,避免了复杂的预处理;
- 设计了一个统一架构,适用于分类、物体分割和场景语义解析;
- 利用对称函数(如最大池化)实现点集顺序不变性;
- 引入 T-Net(空间变换网络)标准化输入点云和特征空间。
难点
- 点云的无序性(Unordered): 点云是点的集合,没有固定顺序;模型必须对输入点的排列顺序不敏感(permutation invariant)。
- 点之间存在相互作用(Interaction among points): 点与点之间有空间关系,需要捕捉局部结构。
- 对几何变换的不变性(Invariance under transformations): 模型输出应不受刚性变换影响(如旋转、平移)。
- 输入点云可能缺失或包含噪声(Missing or noisy points): 实际采集的点云常有遮挡、稀疏、异常值等问题。
解决方案
✅ 难点 1:点云的无序性 → 使用对称函数(Symmetric Function)
- 使用 max pooling 作为对称函数,聚合所有点的信息;
- 所有点经过共享参数的 MLP 提取特征;
- 最终输出与点的顺序无关;
原理说明:
f({x1, ..., xn}) ≈ g(h(x1), ..., h(xn)) = γ(MAX(h(x1), ..., h(xn)))其中:
h(xi)是每个点的高维特征;MAX是 max pooling 函数;γ是后续的全连接网络;- 整个函数 f 是对称的,即对点顺序不敏感。
效果:
- 实验证明 max pooling 比排序、RNN、average pooling 更有效;s
- PointNet 可以处理任意顺序的点集;
✅ 难点 2:点之间的相互作用 → 设计局部 + 全局信息融合机制
- 在分割任务中,将全局特征与每个点的局部特征拼接起来;
- 这样每个点在预测标签时都能看到整个物体的上下文;
效果:
- 显著提升了分割性能;
- 让模型既关注局部细节,又理解整体结构;
✅ 难点 3:对几何变换的不变性 → 引入 T-Net(空间变换网络)
- 引入两个空间变换网络:
- STN3d:对输入点云做刚性变换(3×3 矩阵);
- STNkd:对特征空间做变换(64×64 矩阵);
- 加入正则项约束变换矩阵接近正交:
L_reg = ||I - A @ A^T||_F^2效果:
- PointNet 对点云的旋转、平移等变换具有鲁棒性;
- 提升了模型的泛化能力和稳定性;
✅ 难点 4:输入点云可能缺失或含有异常点 → 理论分析保证模型鲁棒性
- 理论上证明 PointNet 学到的是一个“关键点集”(critical point set),即只依赖一小部分关键点就能判断整体形状;
- 即使丢失一些点或加入异常点,只要关键点还在,结果就不会变;
定理表明:
- 小扰动不会改变函数输出;
- 网络输出由一个有限子集 CS 决定(大小不超过 bottleneck 维度 K);
- CS 是关键点集合,NS 是最大可容忍的点云范围;
实验验证:
- 即使 50% 的点缺失,分类准确率仅下降约 3.7%;
- 对异常点也有一定容忍能力;
✅ 总结: PointNet 通过 max pooling 实现对称性,结合 T-Net 实现变换不变性,并通过局部+全局特征融合机制实现强大的点云建模能力,解决了点云处理中的四大技术难点,为后续三维深度学习奠定了基础。
代码(Pytorch版本)
输入标准化
在 PointNet 架构中,第一层是一个叫做 STN3d(Spatial Transformer Network for 3D points) 的模块,它的目标是:
✅ 对输入的点云做刚性变换(如旋转 + 平移),使其姿态统一,提升模型鲁棒性。
这是因为在实际采集过程中,点云的姿态可能各不相同(比如椅子朝向不同、扫描角度不同等),如果不加处理,会影响特征提取的一致性。
STN3d 是一个小型神经网络,专门用于预测一个 3×3 的变换矩阵 ,这个矩阵表示对点云所做的变换(通常是旋转或反射)。
它具有以下特点:
- 输入是原始点云(shape: (B, 3, N));
- 输出是一个变换矩阵(shape: (B, 3, 3));
- 这个变换矩阵是近似正交的,保证变换是刚性的;
- 变换矩阵会通过 torch.bmm() 应用到原始点云上(这一步不在 STN3d 类中);
- 目的是让点云“摆正”,便于后续处理。
代码实现:
class STN3d(nn.Module):
def __init__(self):
super(STN3d, self).__init__()
# 使用 1D 卷积 处理点云数据(每个点有 3 个坐标值)
# kernel_size=1 表示只在通道维度操作,不考虑空间邻域关系
# 提取每一点的特征向量(从 3 → 64 → 128 → 1024)
self.conv1 = torch.nn.Conv1d(3, 64, 1)
self.conv2 = torch.nn.Conv1d(64, 128, 1)
self.conv3 = torch.nn.Conv1d(128, 1024, 1)
# 经过全局池化后得到一个全局特征向量(1024维)
# 用全连接层逐步压缩到 9 个输出 → 对应一个 3x3 的变换矩阵
self.fc1 = nn.Linear(1024, 512)
self.fc2 = nn.Linear(512, 256)
self.fc3 = nn.Linear(256, 9)
# 所有卷积和 FC 层后面都加了 BN 和 ReLU,帮助训练稳定收敛
self.relu = nn.ReLU()
self.bn1 = nn.BatchNorm1d(64)
self.bn2 = nn.BatchNorm1d(128)
self.bn3 = nn.BatchNorm1d(1024)
self.bn4 = nn.BatchNorm1d(512)
self.bn5 = nn.BatchNorm1d(256)
# x: (batch,3,point_size)
def forward(self, x):
# 获取当前 batch 的大小(有多少组点云)
batchsize = x.size()[0]
# CNN 逐点,通道维度特征提取阶段
x = F.relu(self.bn1(self.conv1(x)))
x = F.relu(self.bn2(self.conv2(x)))
x = F.relu(self.bn3(self.conv3(x))) # x: (batch,1024,point_size)
# 全局最大池化(Global Max Pooling)
# 从所有点中选出每个通道的最大响应值,作为整个点云的“抽象”表示,shape: (B, 1024)
# 返回:一个元组:(values, indices),分别是最大值和它们的位置索引。
x = torch.max(x, 2, keepdim=True)[0] # x: (batch,1024,1)
x = x.view(-1, 1024) # x: (batch,1024)
# 全连接层预测变换矩阵
x = F.relu(self.bn4(self.fc1(x)))
x = F.relu(self.bn5(self.fc2(x)))
x = self.fc3(x) # x: (batch,9)
# 加上单位矩阵作为初始偏置
# 初始假设变换为恒等变换(不做任何变化)
iden = Variable(torch.from_numpy(np.array([1,0,0,0,1,0,0,0,1]).astype(np.float32))).view(1,9).repeat(batchsize,1)
if x.is_cuda:
iden = iden.cuda()
# 让网络从一个小扰动开始学习,更容易训练
x = x + iden
# 最终 reshape 成 3x3 矩阵返回
x = x.view(-1, 3, 3)
return x标准化的意义:
✅ 1. 解决点云姿态不一致问题
- 输入点云可能来自不同角度、不同位置;
- T-Net 把它们“对齐”到一个标准姿态;
- 这样 PointNet 后续的特征提取更稳定。
✅ 2. 提升模型鲁棒性
- 如果没有 T-Net,PointNet 必须自己学会对各种姿态都识别准确;
- 加入 T-Net 后,相当于加了一个“预处理层”,让模型更容易训练和泛化。
神经网络的输出在训练初期往往接近于零,如果直接作为变换矩阵,会导致非正交、不稳定。PointNet 通过“加单位矩阵”的方式,让变换矩阵从一个恒等变换开始学习,并结合正则化损失,逐步向正交矩阵靠拢,从而保证变换是刚性的、稳定的。
正则化损失
feature_transform_regularizer 是 PointNet 中用于约束变换矩阵接近正交性的正则化损失函数。
🧠 为什么需要这个正则化项?
在 PointNet 中,为了提升模型对点云姿态变化的鲁棒性,引入了两个变换网络:
- STN3d: 对原始点云做刚性变换(如旋转、反射),使其标准化。
- STNkd: 对特征空间做变换,使特征分布更稳定。
这两个网络输出的是变换矩阵(分别是 3×3 和 k×k 的矩阵)。但由于它们是神经网络直接预测出来的,并不能保证这些矩阵是正交矩阵(orthogonal matrix) 。
❗而只有正交矩阵才能表示刚性变换(rigid transformation),即只改变物体的方向而不改变形状和大小。
所以我们需要加一个正则化项来鼓励变换矩阵接近正交矩阵 , 这就是 feature_transform_regularizer 的作用!
def feature_transform_regularizer(trans):
d = trans.size()[1]
batchsize = trans.size()[0]
# 构造一个单位矩阵 I,用于后续比较;
# 添加 None 是为了扩展成 (1, d, d),便于广播到整个 batch;
I = torch.eye(d)[None, :, :]
if trans.is_cuda:
I = I.cuda()
# 计算变换矩阵与其转置相乘后与单位矩阵之间的距离(Frobenius 范数),然后取 batch 平均值作为损失项,鼓励变换矩阵接近正交矩阵。
# Frobenius 范数(矩阵所有元素平方和开方)
loss = torch.mean(torch.norm(torch.bmm(trans, trans.transpose(2,1)) - I, dim=(1,2)))
return loss特征提取
PointNet 的核心特征提取模块 PointNetfeat ,它负责从输入点云中提取出可用于分类或分割的特征。
class PointNetfeat(nn.Module):
def __init__(self, global_feat = True, feature_transform = False):
super(PointNetfeat, self).__init__()
# 输入点云变换网络(3D)
self.stn = STN3d()
# 使用 Conv1D 对每个点进行特征提取;
# 每个卷积层后跟一个 BatchNorm 层;
# 最终输出高维特征(1024维);
self.conv1 = torch.nn.Conv1d(3, 64, 1)
self.conv2 = torch.nn.Conv1d(64, 128, 1)
self.conv3 = torch.nn.Conv1d(128, 1024, 1)
self.bn1 = nn.BatchNorm1d(64)
self.bn2 = nn.BatchNorm1d(128)
self.bn3 = nn.BatchNorm1d(1024)
# 全局特征开关:控制是否输出全局特征
self.global_feat = global_feat
# 特征变换开关:控制是否使用 STN 对特征空间进行变换
self.feature_transform = feature_transform
if self.feature_transform:
self.fstn = STNkd(k=64)
def forward(self, x):
n_pts = x.size()[2]
# 使用 STN3d 预测出一个变换矩阵;
trans = self.stn(x)
x = x.transpose(2, 1)
# 将原始点云“摆正”;
x = torch.bmm(x, trans)
x = x.transpose(2, 1)
# 再通过第一个卷积层提取初始特征;
x = F.relu(self.bn1(self.conv1(x)))
if self.feature_transform:
trans_feat = self.fstn(x)
x = x.transpose(2,1)
x = torch.bmm(x, trans_feat)
x = x.transpose(2,1)
else:
trans_feat = None
# 提取更高维的特征;
# 最后一层输出 shape: (B, 1024, N)
pointfeat = x
x = F.relu(self.bn2(self.conv2(x)))
x = self.bn3(self.conv3(x))
# 从所有点中选出每个通道的最大响应值,作为整个点云的“抽象”表示,shape: (B, 1024)
# 返回:一个元组:(values, indices),分别是最大值和它们的位置索引。
x = torch.max(x, 2, keepdim=True)[0]
x = x.view(-1, 1024)
# 如果是分类任务 (global_feat=True):
if self.global_feat:
return x, trans, trans_feat
else:
# 如果是分割任务 (global_feat=False):
x = x.view(-1, 1024, 1).repeat(1, 1, n_pts)
return torch.cat([x, pointfeat], 1), trans, trans_feat✅ 如果是分类任务 (global_feat=True),则返回:
- x: 全局特征 (B, 1024)
- trans: 输入点云变换矩阵
- trans_feat: 特征空间变换矩阵(可选)
✅ 如果是分割任务 (global_feat=False), 则返回:
- 把全局特征复制 N 次并与每个点的局部特征,在通道维度进行拼接
- 将每个点的局部特征与整个点云的全局特征拼接起来,让每个点都能看到上下文信息
- 输出 shape: (B, 1088, N) ,即 1088 = 1024+64
分类任务
PointNet 的分类模块 PointNetCls ,它基于前面的特征提取模块 PointNetfeat 来完成点云分类任务。
class PointNetCls(nn.Module):
def __init__(self, k=2, feature_transform=False):
super(PointNetCls, self).__init__()
self.feature_transform = feature_transform
# 它使用 PointNetfeat 提取全局特征(1024维);
self.feat = PointNetfeat(global_feat=True, feature_transform=feature_transform)
# 然后通过全连接层(MLP)将这些特征映射到类别空间;
self.fc1 = nn.Linear(1024, 512)
self.fc2 = nn.Linear(512, 256)
self.fc3 = nn.Linear(256, k)
self.dropout = nn.Dropout(p=0.3)
self.bn1 = nn.BatchNorm1d(512)
self.bn2 = nn.BatchNorm1d(256)
self.relu = nn.ReLU()
def forward(self, x):
# 它使用 PointNetfeat 提取全局特征(1024维);
x, trans, trans_feat = self.feat(x)
# 然后通过全连接层(MLP)将这些特征映射到类别空间;
x = F.relu(self.bn1(self.fc1(x)))
x = F.relu(self.bn2(self.dropout(self.fc2(x))))
x = self.fc3(x)
# 最终输出每个类别的概率分布(log_softmax);
return F.log_softmax(x, dim=1), trans, trans_feat分割任务
PointNet 的分割模块 PointNetDenseCls ,它基于前面的特征提取模块 PointNetfeat 来完成点云物体分割任务。
class PointNetDenseCls(nn.Module):
def __init__(self, k = 2, feature_transform=False):
super(PointNetDenseCls, self).__init__()
self.k = k
self.feature_transform=feature_transform
self.feat = PointNetfeat(global_feat=False, feature_transform=feature_transform)
self.conv1 = torch.nn.Conv1d(1088, 512, 1)
self.conv2 = torch.nn.Conv1d(512, 256, 1)
self.conv3 = torch.nn.Conv1d(256, 128, 1)
self.conv4 = torch.nn.Conv1d(128, self.k, 1)
self.bn1 = nn.BatchNorm1d(512)
self.bn2 = nn.BatchNorm1d(256)
self.bn3 = nn.BatchNorm1d(128)
def forward(self, x):
batchsize = x.size()[0]
n_pts = x.size()[2] # 点的数量
# 调用 PointNetfeat 提取特征
# 最后将每个点的局部特征与整个点云的全局特征拼接起来,让每个点都能看到上下文信息
x, trans, trans_feat = self.feat(x)
# 使用多层 Conv1D 层进一步融合局部 + 全局信息
# 最终输出 shape: (B, k, N)
x = F.relu(self.bn1(self.conv1(x)))
x = F.relu(self.bn2(self.conv2(x)))
x = F.relu(self.bn3(self.conv3(x)))
x = self.conv4(x)
# shape: (B, k, N) -> (B, N, k) , 即每个点的各个类别得分
x = x.transpose(2,1).contiguous()
# 使用 log_softmax 得到 log 概率分布;
x = F.log_softmax(x.view(-1,self.k), dim=-1) # shape: (B*N, k)
x = x.view(batchsize, n_pts, self.k) # shape: (B, N, k)
return x, trans, trans_feat✅ 1. 每个点都需要全局上下文
- 仅靠局部特征很难判断某个点属于哪个部件(比如椅子的腿 vs 座位);
- 加上全局特征后,相当于告诉模型:“你知道吗,这是一个椅子”;
- 这样模型就能根据上下文更准确地做出判断;
✅ 2. 全局特征不能直接用于分割
- 全局特征只有一份((B, 1024)),无法直接用于每个点;
- 所以要把它复制 N 次,变成 (B, 1024, N);
- 再与每个点的局部特征拼接;
缺陷
🧠 一、核心问题:忽略局部结构信息
PointNet 只通过 max pooling 聚合所有点的信息,忽略了局部邻域之间的结构关系。
🔍 原因分析:
- PointNet 对每个点独立处理(参数共享),然后使用全局最大池化(Global Max Pooling)提取特征;
- 这种设计使得网络只关注“最显著的点”,而没有建模点与点之间的局部几何关系;
- 导致模型无法捕捉到更细粒度的几何细节,比如边缘、曲率、表面纹理等;
💡 论文中的验证:
- 在部件分割任务中,虽然 PointNet 表现不错,但在一些复杂区域(如椅子腿和桌面连接处)容易出错;
- 分类任务中对缺失点具有一定鲁棒性,但遇到遮挡严重或点分布不均匀时性能下降明显;
📉 二、分割任务依赖拼接机制,不够精细
PointNet 的分割模块通过拼接全局特征 + 局部特征实现上下文感知,但这种方式表达能力有限。
🔍 原理回顾:
- PointNet 的分割网络将全局特征复制 N 次并与每个点的局部特征拼接;
- 然后使用 Conv1D 进行分类;
- 实际上是用一个固定大小的全局特征去“广播”给每个点;
⚠️ 问题所在:
- 全局特征不能很好地反映每个点的上下文;
- 拼接方式缺乏动态调整机制;
- 难以区分语义相近但位置不同的区域(如桌子边缘 vs 中心);
🧱 三、对局部形状变化敏感
PointNet 提取的关键点集合(critical point set)可能不足以代表复杂的局部结构。
🔍 实验观察:
- 在论文中提到,PointNet 学到的是一个关键点集合,这些点大致构成物体的骨架;
- 如果这些关键点缺失或被遮挡,即使其他点都在,也可能导致错误分类;
- 对于非刚性变形(如人体姿态变化),PointNet 的表现不如基于图结构的模型;
📈 四、分类性能略逊于多视角方法
在某些标准数据集(如 ModelNet40)上,PointNet 的分类准确率略低于 MVCNN 等基于图像的方法。
| 方法 | 分类准确率 |
|---|---|
| MVCNN(多视角 CNN) | 90.1% |
| VoxNet(体素 CNN) | 85.9% |
| PointNet | 89.2% |
虽然 PointNet 在速度和效率上占优,但在精度上仍略逊一筹。
🧩 五、难以捕捉非刚性变换下的不变性
PointNet 使用 T-Net 强制学习正交变换矩阵,只能处理刚性变换(旋转、反射),无法处理非刚性形变(如弯曲、拉伸)。
🔍 举例说明:
- 如果你有一张人脸的点云,由于表情不同,面部发生形变;
- PointNet 很难在这种情况下保持分类的一致性;
- 相比之下,基于图卷积或注意力机制的模型更能捕捉这种非刚性变化;
🧱 六、缺乏层次化特征提取机制
PointNet 是一种单尺度网络,无法像 CNN 那样逐层提取多层次的抽象特征。
✅ 后续改进:
- PointNet++ 正是对这一缺陷的改进;
- 它引入了局部区域搜索 + 多尺度聚合机制;
- 从而能够更好地捕捉点云的局部结构和层次信息;
📊 七、对稀疏点云敏感
当输入点云非常稀疏时(如只有几十个点),PointNet 的性能会显著下降。
🔍 原因分析:
- PointNet 的全局特征来自于 max pooling;
- 如果点太少,max pooling 得到的特征可能无法覆盖整个物体;
- 特别是在遮挡严重的情况下,关键点可能丢失;
📐 八、结构简单,不利于高维空间建模
PointNet 的结构过于简单,难以建模更高维度的空间关系。
✅ 后续发展:
- 后续的 3D 深度学习模型(如 DGCNN、SpiderCNN、PointCNN、Transformer-based 点云模型)都尝试引入更复杂的结构来提升建模能力;
- 如:构建点之间的邻接图、使用 attention、引入多尺度采样等;
🧪 九、理论上的限制:受限于瓶颈维度 K
PointNet 的表达能力受 max pooling 层维度 K 的限制,即 bottleneck dimension。
📌 来自论文的理论分析:
Theorem 2 表明,PointNet 的输出仅由一个不超过 K 个点的子集决定(critical point set),这意味着:
- 如果 K 不够大,PointNet 可能遗漏重要细节;
- 如果 K 太大,又会导致计算资源浪费;
🧱 十、对噪声点敏感(尤其未训练时)
虽然 PointNet 对少量异常点有一定鲁棒性,但如果训练时没有加入扰动,面对大量噪声点时效果较差。
🔍 实验验证:
- 论文中做了“插入异常点”的实验;
- 结果显示,如果训练过程中加入了噪声,模型表现良好;
- 否则,异常点会影响分类和分割性能;
📉 十一、在大规模场景理解任务中表现一般
PointNet 的时间复杂度虽然是 O(N),但在处理超大规模点云时,仍然不如分块处理或多层级聚合模型高效。
✅ 后续改进方向:
- 使用分块策略(chunking)
- 构建点云的层次化表示
- 引入 attention 或图结构增强局部建模能力
🧩 总结表格:PointNet 的主要缺陷
| 缺陷类型 | 描述 | 是否被后续模型改进 |
|---|---|---|
| 忽略局部结构 | 仅靠 max pooling 提取特征,无局部聚合机制 | ✅ PointNet++ 改进 |
| 分割精度不高 | 拼接机制不够精细,缺乏动态上下文感知 | ✅ Transformer-based 改进 |
| 无法处理非刚性变形 | T-Net 只学正交变换,无法应对弯曲、拉伸等形变 | ✅ 图卷积、attention 改进 |
| 分类精度略低 | 在 ModelNet40 上略低于 MVCNN | ✅ 多视角 + PointNet 混合模型改进 |
| 稀疏点云下性能差 | 少量点无法覆盖关键结构 | ✅ PointNet++ 改进 |
| 局部建模能力弱 | 无法捕捉边缘、曲率等细节 | ✅ DGCNN、SpiderCNN 改进 |
| 对噪声点敏感 | 未经扰动训练时,对异常点鲁棒性差 | ✅ 加入数据增强后缓解 |
| 结构单一 | 缺乏层次化、多尺度建模能力 | ✅ PointNet++ / Transformer 改进 |
📈 PointNet 的优势 vs 缺陷对比
| 维度 | 优势 | 缺陷 |
|---|---|---|
| 输入形式 | 支持原始点云,无需预处理 | 无法有效利用局部结构 |
| 排列不变性 | 完全支持 | 无法区分顺序信息(如时间序列点云) |
| 变换不变性 | 支持刚性变换标准化 | 无法处理非刚性形变 |
| 分类性能 | 接近 SOTA | 略逊于多视角 CNN |
| 分割性能 | 表现良好 | 缺乏精细建模 |
| 效率 | 极其高效(O(N)) | 无法充分利用 GPU 并行优化 |
| 扩展性 | 易于扩展为检测、检索等任务 | 表达能力受限于 max pooling 维度 |
✅ 一句话总结:
PointNet 的最大缺陷在于它“看不清细节”,只关注全局结构,忽视局部邻域关系,这使得它在细粒度识别、非刚性变形、稀疏点云等任务中表现受限,但它也为后续模型奠定了基础。
背景知识扫盲(可选)
点云
点云: 是一种表示三维空间中物体或场景的方式,它由大量带有位置信息的点组成。
每个点通常包含:
- 坐标信息 :x, y, z(3D 空间中的位置)。
- 可选属性:颜色(RGB)、法向量(Normal)、强度(Intensity)、时间戳等。
表示形式:
点云(Point Cloud): 原始点集合:每个点有(x, y, z)坐标; 可选颜色、法向量等属性, 简洁、轻便; 保留原始几何信息,无序性、非结构化、难以用 CNN 处理。
体素网格 (voxel grids) : 将空间划分成立方体格子,每个格子表示是否有物体; 结构规整,适合 3D CNN; 计算复杂度高、稀疏性强、精度受限。
多视角图像(Multi-View Images): 从多个角度渲染点云或 3D 模型为 2D 图像; 可使用成熟的 2D CNN 方法; 丢失部分几何信息,依赖视角选择。
网格(Mesh): 由三角形面片组成的 3D 模型; 包含表面细节,适合渲染; 难以自动构建,拓扑复杂。
对称函数
对称函数(Symmetric Function)是一种对输入顺序不敏感的函数;换句话说,无论你如何打乱输入元素的顺序,输出结果都保持不变。
🧠 数学定义:
设
那么
PointNet 处理的是点云数据,而点云是无序集合(unordered set) ,即:
- 点云中点的顺序不影响整体形状。
- 所以模型必须具有对点顺序的不变性(permutation invariance)。
- 这就要求网络中的某些关键操作必须是对称函数 ,才能保证整个网络输出与输入点的顺序无关。
📦 常见的对称函数:
| 函数 | 描述 | 是否可微 | 应用场景 |
|---|---|---|---|
| 最大池化(Max Pooling) | 取所有点的最大值: | ✅ 是 | PointNet 中的核心操作 |
| 平均池化(Average Pooling) | 取所有点的平均值: | ✅ 是 | 特征融合、平滑处理 |
| 求和(Summation) | 所有点相加: | ✅ 是 | 构建全局特征向量 |
| 乘积(Product) | 所有点相乘: | ⚠️ 对数值变化敏感 | 不常用,但可用于特定任务 |
| 最小池化(Min Pooling) | 取最小值: | ✅ 是 | 异常检测等特殊场景 |
| Softmax + 加权和(Attention-based Sum) | 根据注意力机制加权求和,权重由 softmax 得出 | ✅ 是 | DGCNN、Transformer 中使用 |
| 统计量(如方差、标准差) | 计算点集的分布特性 | ✅ 是 | 特征增强、异常检测 |
| 集合函数近似器(如 Deep Sets) | 使用神经网络直接学习对称函数 | ✅ 是 | 更复杂的对称函数建模 |
刚性运动
刚性运动(rigid motions) 是指:物体在空间中移动时,其形状和大小保持不变的运动方式 。
| 刚性运动 | ❌ 不改变 | 移动、旋转 |
|---|---|---|
| 非刚性运动 | ✅ 改变 | 弯曲、拉伸、缩放(非均匀)、变形 |
刚性运动 = 平移 + 旋转,不改变物体形状和内部结构,只改变位置和朝向。
正交变换
正交变换的本质是:只改变物体的方向(旋转),不改变形状和大小
所以:
- 正交变换包括:旋转 + 反射。
- 不包括:缩放、剪切、拉伸等会导致形变的操作。