
Emerging Properties in Self-Supervised Vision Transformers 论文解读
论文链接: Emerging Properties in Self-Supervised Vision Transformers
代码链接: https://github.com/facebookresearch/dino
引言
Vision Transformer(ViT)近期成为卷积神经网络(convnets)的替代方案,在视觉识别任务中表现出竞争力。但与 convnets 相比,ViT 存在以下不足:
计算开销更大
需要更多训练数据
提取的特征不具备独特优势
研究者提出一个问题:是否是 监督式预训练 限制了 Transformer 在视觉中的潜力?在 NLP 任务中,Transformer 的成功很大程度上得益于 自监督学习(如 BERT 的掩码预测、GPT 的语言建模),这些预训练目标利用上下文信息提供了更丰富的学习信号,而不仅仅是单一标签。相比之下,图像监督学习往往把丰富的视觉信息压缩为一个类别标签,导致潜在信息损失。因此,研究者探索 自监督学习是否能为 ViT 带来新的特性。
论文通过研究自监督预训练对 ViT 特征的影响,得到以下核心结论(部分如图1所示):
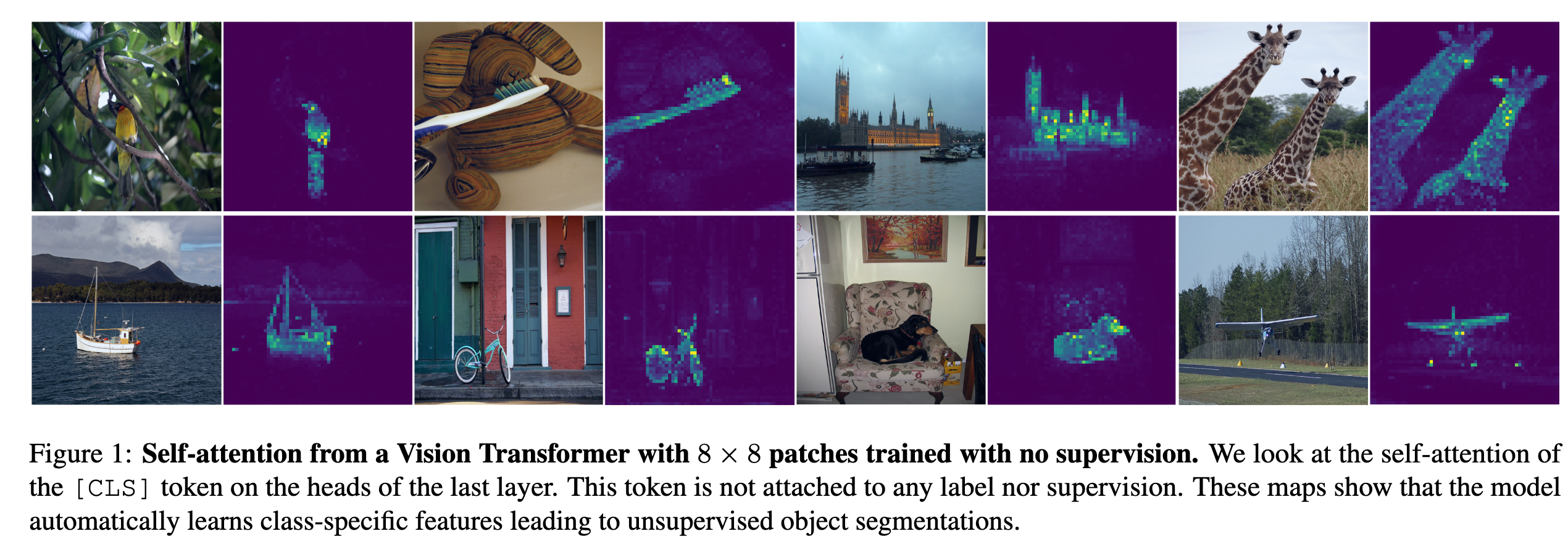
显式的语义分割信息: 自监督 ViT 特征中会自然出现场景布局与物体边界,这些信息可以直接在最后一个 Transformer block 的自注意力模块中读取。相比之下,监督 ViT 和 convnets 并不显式包含这些特征。
优异的 k-NN 分类性能: 在完全不做微调、线性分类器训练或数据增强的情况下,单纯使用最近邻分类器(k-NN),自监督 ViT 在 ImageNet 上可达到 78.3% top-1 准确率。
分割掩码的普遍性与关键条件: 分割掩码的涌现似乎是自监督方法的普遍属性,但要想在 k-NN 上取得良好性能,必须结合以下组件:
动量编码器(momentum encoder)
多视角裁剪增强(multi-crop augmentation)
小 patch 的重要性: 使用更小的 patch 能显著提升 ViT 特征质量。
基于以上发现,作者提出了 DINO(self-distillation with no labels),它可以被理解为一种 无标签的知识蒸馏:
学生网络通过交叉熵损失,直接预测教师网络(由动量编码器构建)的输出。
为避免模型塌缩,仅需在教师输出上应用 居中(centering)与锐化(sharpening)。
相比之下,其他方法使用的复杂组件(如 predictor、先进归一化方式或对比损失)并未带来额外收益。
性能表现:
在 ImageNet 线性分类基准上,DINO + ViT-Base(小 patch)达到 80.1% top-1,显著超越之前的自监督方法。
在 ResNet-50 上,DINO 的表现与最新的自监督系统相当。
灵活性与通用性:
- DINO 同时适用于 ViT 和 convnets,无需对架构或归一化方式做修改。
计算效率:
- 在资源有限的场景下,仅需 2 台 8-GPU 服务器训练 3 天,DINO + ViT 就能在 ImageNet 线性基准上达到 76.1% top-1,超越了同规模 convnets 的自监督系统,同时计算开销更低。
相关工作
自监督学习的发展路径
自监督学习主要经历了以下几类方法:
实例分类(Instance Classification):把每张图像当作一个独立类别,训练模型去区分它们(允许数据增强后的一致性)。但问题是,当数据规模增大时,显式地学习分类器无法很好扩展。
NCE(噪声对比估计)方法:通过比较图像特征而不是分类,避免了巨量类别的学习。但这种方法要求一次性比较大量样本,因此需要 超大 batch size 或 记忆库(memory bank)。
聚类式方法:自动将实例分组,从而缓解对大规模比较的需求。
无须区分图像的学习方法:近期研究发现,不必显式区分图像也能学到好特征。典型例子是 BYOL,它通过让学生特征去匹配由 动量编码器(momentum encoder) 生成的教师特征来学习。即使去掉动量编码器,BYOL 仍然能工作,但性能下降。
在 BYOL 的启发下,出现了一系列扩展方向:
匹配更复杂的表示
将特征训练为匹配 均匀分布
通过 白化(whitening) 来约束特征学习
DINO 借鉴了 BYOL 的思想,但不同点在于:它使用 不同的相似性匹配损失,并且 学生和教师完全相同的架构。因此,DINO 补充了 BYOL 的观点,把自监督学习解释为 一种无标签的 Mean Teacher 自蒸馏(self-distillation)。
自训练与知识蒸馏的联系
自训练(Self-training) 的目标是:利用少量标注,将知识传播到大量无标签数据中,以提升特征质量。这种传播方式有两类:
硬标签分配(hard assignments)
软标签分配(soft assignments)
当使用软标签时,这种方法通常被称为 知识蒸馏(Knowledge Distillation),最初是为了让小模型模仿大模型的输出,从而实现模型压缩。
Xie 等人 提出,蒸馏还能用于将软伪标签传播到无标签数据,这表明 自训练与知识蒸馏本质上是相关的。
在此基础上,DINO 进一步发展:
将知识蒸馏扩展到 无标签场景。
与过去依赖 固定、预训练教师模型 的方法不同,DINO 的教师模型在训练过程中是 动态更新的。
这样一来,知识蒸馏不再是自监督预训练之后的 后处理步骤,而是直接作为 自监督目标函数。
此外,DINO 也与 协同蒸馏(Codistillation) 有关。协同蒸馏中,学生与教师使用相同架构,并在训练中相互蒸馏。但不同的是:在协同蒸馏里,教师也会从学生蒸馏;而在 DINO 中,教师参数是通过 学生参数的指数移动平均(EMA) 来更新的。
方法
基于知识蒸馏的自监督学习
DINO(Distillation with No Labels)整体框架与近年来的自监督学习方法类似(如SimCLR、BYOL等),但其核心思想借鉴了 知识蒸馏(Knowledge Distillation)。在该框架中,我们训练一个学生网络
对于输入图像
其中,
在传统的知识蒸馏中,学生通过最小化交叉熵损失来学习匹配教师的分布:

DINO在此基础上引入 多视角(multi-crop)策略:
从同一张图片中生成多个视角(裁剪),形成集合
包含两张分辨率较高的 全局视角
学生网络处理所有视角,教师网络只处理全局视角,从而实现 局部-全局对齐。
最终损失函数为:
在默认参数设置下:
全局视角分辨率为
局部分辨率为
与传统知识蒸馏不同,DINO的教师网络不是固定的,而是由学生网络迭代生成:
冻结教师:在一个epoch内固定教师参数,效果不错。
直接拷贝学生参数:无法收敛。
EMA(指数滑动平均)更新:效果最佳。
更新规则为:
其中
网络
Backbone
投影头
值得注意的是:
DINO不使用预测器(predictor),因此学生和教师网络架构完全相同。
ViT没有使用BN(Batch Normalization),因此整个系统BN-free。
在自监督学习中,如果所有样本映射到相同的表示,会出现 坍塌问题。DINO采用以下机制来避免:
居中(Centering):防止某一维度主导表示,但容易导致均匀分布坍塌。
锐化(Sharpening):通过较低温度参数
结合使用:居中与锐化效果互补,可以有效避免坍塌。
其中,居中操作等价于给教师输出加一个偏置项
其中
实现细节
Vision Transformer (ViT) 的机制
ViT 将图像切分为不重叠的
这些 patch token 和 [CLS] token 被输入到标准的 Transformer 网络,网络采用 pre-norm 的 LayerNorm。Transformer 由自注意力层与前馈层组成,并带有跳跃连接。自注意力层通过 attention 机制让每个 token 能够参考其他 token 的表示,进而更新自身表示。
实现细节
预训练在 无标签的 ImageNet 上进行。
优化器:AdamW
批量大小:1024(ViT-S/16 下分布在 16 个 GPU 上)
学习率:前 10 个 epoch 内线性升至基础值,基础值遵循线性缩放规则:
学习率调度:余弦退火
权重衰减:同样采用余弦调度,从 0.04 增加到 0.4
温度:学生温度
数据增强:采用 BYOL 的增强方式(颜色抖动、高斯模糊、光照变换 solarization),并结合 multi-crop;同时使用双三次插值(bicubic interpolation)调整位置编码以适配不同尺度
评估协议
自监督学习的常见评估方式有两类:
线性评估:冻结特征,训练线性分类器;训练阶段使用随机裁剪缩放和水平翻转,测试阶段用中心裁剪来报告准确率。
微调评估:以预训练权重初始化网络,并在训练过程中更新参数。
但这两种方法对超参数较为敏感,例如学习率不同会导致准确率差异较大。因此,论文还引入了 k-NN 最近邻分类器 来简化特征质量评估:
将预训练模型冻结,用它提取并存储下游任务训练集的特征
对于输入图片,找到其特征的
实验发现
这种方法的优势在于:
不需要超参数调节
不依赖数据增强
只需一次遍历下游数据集即可完成评估
因此大大简化了特征评估的流程。
消融实验
Patch大小的重要性
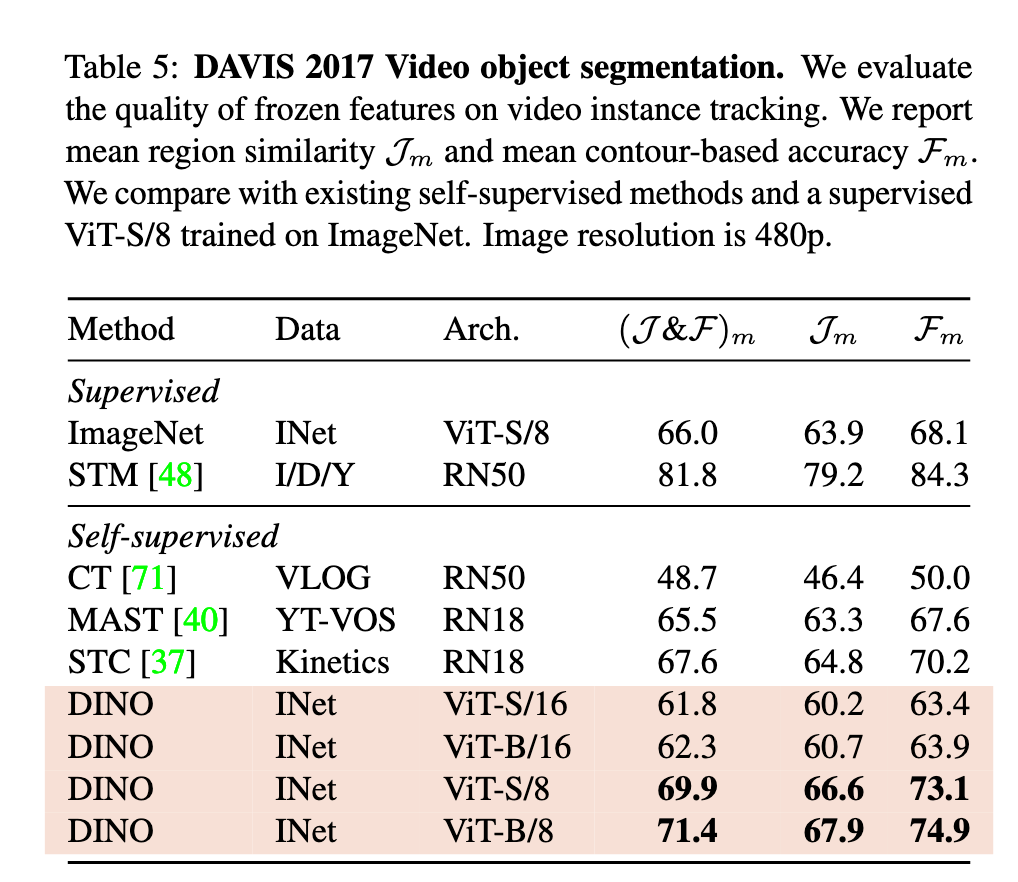
研究发现,更小的Patch尺寸能显著提升ViT-S的k-NN分类性能(如表5所示)。例如:
ViT-S/16 → ViT-S/8 → ViT-S/5,性能逐步提升
ViT-B同样表现出这种趋势
这种提升并不依赖增加模型参数,但会牺牲吞吐率:
5×5 patch 的吞吐率仅 44 im/s
8×8 patch 的吞吐率为 180 im/s
因此,更小的Patch能带来准确率提升,但需要付出计算速度代价。
教师网络的选择
在DINO中,教师网络扮演关键角色。实验结果表明:
使用 上一轮迭代的学生网络 作为教师,模型无法收敛,除非增加额外的归一化。
使用 前一个epoch的学生网络 作为教师,模型不会崩溃,k-NN结果与MoCo-v2、BYOL等框架接近。
使用 动量教师 时效果最佳,显著优于上述方法。
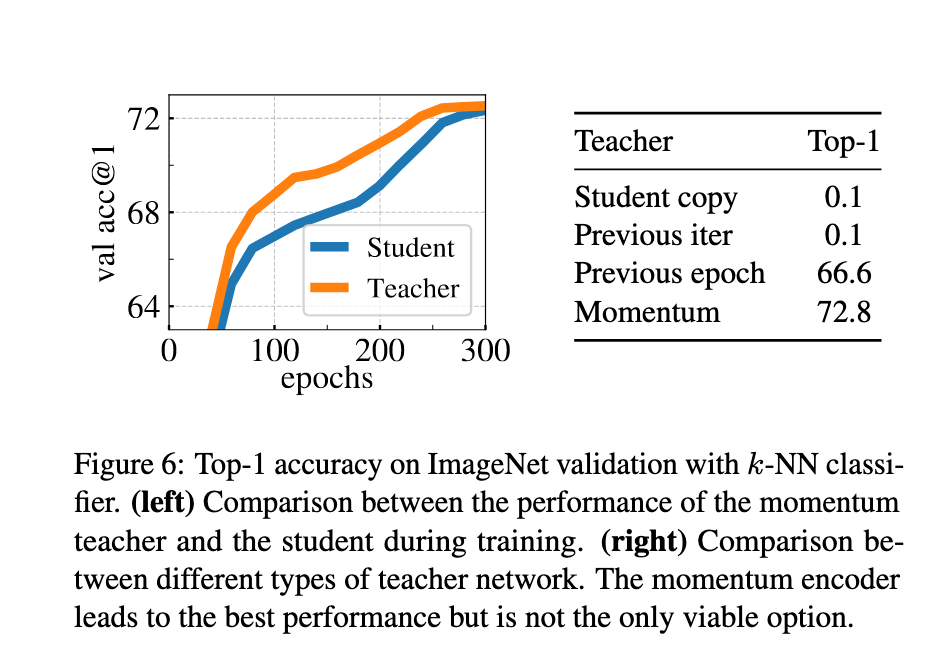
进一步分析(如图6所示):
动量教师在整个训练过程中始终优于学生模型,无论是ViT还是ResNet-50。
这一现象在其他动量方法(如MoCo)中未被观察到。
作者将动量教师解释为一种 指数衰减的Polyak-Ruppert平均,相当于在训练中持续进行模型集成,构建出性能更强的教师来指导学生学习。
避免崩溃
DINO训练中可能出现两种形式的崩溃:
均匀输出:模型对所有输入输出一致的分布
单维主导:输出仅集中在一个维度
DINO通过 居中(centering) 和 目标锐化(sharpening) 来避免这两类崩溃:
居中操作抑制单维主导,但会推动输出趋向均匀
锐化操作则产生相反作用,抑制均匀输出
作者用交叉熵公式来解释:
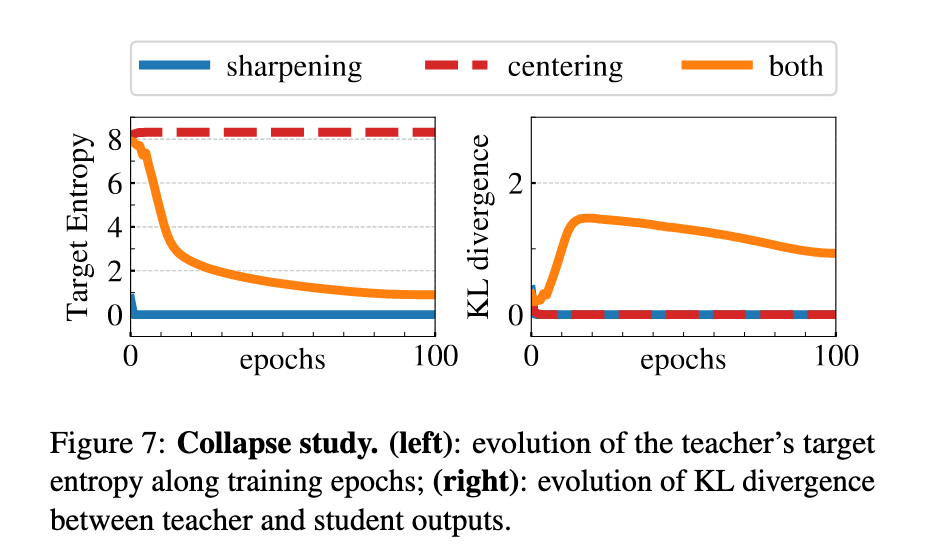
其中,若
缺少居中 →
缺少锐化 →
同时使用居中和锐化 → 两种崩溃被平衡并避免
计算需求
在两台8-GPU服务器上训练ViT-S/16 DINO模型时,作者对比了不同的 multi-crop策略:
无multi-crop(2×224²):72.5%准确率,耗时46小时,显存9.3G
multi-crop (2×224²+10×96²):74.6%准确率,仅需24小时,显存15.4G
可见:
multi-crop 提升了准确率/训练时间的性价比
更多视角数(如6×、10×96²)带来的提升逐渐减弱
DINO最终在两台8-GPU、3天内达到了 76.1% top-1准确率,超越了同规模CNN的自监督方法,同时计算需求更低
小批量训练
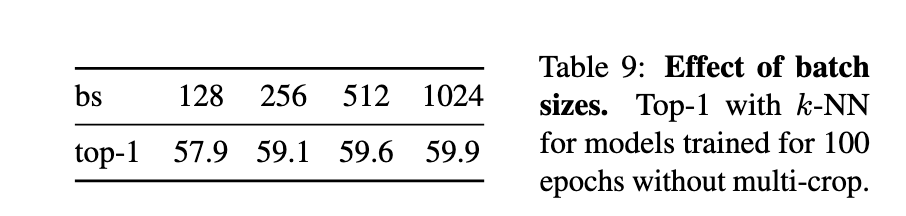
DINO同样可以在小batch下训练(如表9所示):
默认 batch size = 1024
batch size = 128 时性能略低,但仍能达到较高水平
batch size = 128 的实验仅需1张GPU即可运行
batch size = 8 时,训练50个epoch能达到35.2%准确率,显示了在极小显存条件下训练大模型的潜力
学习率采用线性缩放:
不过,小batch训练可能需要重新调整超参数(如动量率)才能达到最佳效果。
代码解析
从本节开始我们将对官方开源的 DINO 模型代码实现进行详细讲解,下图给出的是 DINO 模型的运行完整流程图:

按照 DINO 模型的训练流程,第一步首先是对 输入图像 进行数据增强,生成 两张全局视角图像 + 若干局部视角图像, 该过程由 DataAugmentationDINO 类实现,代码如下:
class DataAugmentationDINO(object):
"""
数据增强类,用于 DINO 训练。
主要思想:从一张输入图像生成多个视角(multi-crop),
包括 2 张全局裁剪图像(224x224)和若干张局部裁剪图像(96x96)。
"""
def __init__(self, global_crops_scale, local_crops_scale, local_crops_number):
# 基础增强:随机翻转 + 颜色抖动 + 随机灰度化
flip_and_color_jitter = transforms.Compose([
transforms.RandomHorizontalFlip(p=0.5), # 以 50% 概率水平翻转
transforms.RandomApply( # 以 80% 概率执行颜色抖动
[transforms.ColorJitter(
brightness=0.4, # 亮度变化
contrast=0.4, # 对比度变化
saturation=0.2, # 饱和度变化
hue=0.1 # 色调变化
)],
p=0.8
),
transforms.RandomGrayscale(p=0.2), # 以 20% 概率转为灰度图
])
# 标准化(Imagenet 预训练均值/方差)
normalize = transforms.Compose([
transforms.ToTensor(), # 转换为 Tensor
transforms.Normalize(
(0.485, 0.456, 0.406), # mean
(0.229, 0.224, 0.225) # std
),
])
# ----------- 全局裁剪 1 -----------
self.global_transfo1 = transforms.Compose([
# 随机裁剪并缩放到 224x224
transforms.RandomResizedCrop(224, scale=global_crops_scale, interpolation=Image.BICUBIC),
flip_and_color_jitter,
utils.GaussianBlur(1.0), # 高斯模糊(概率 100%)
normalize,
])
# ----------- 全局裁剪 2 -----------
self.global_transfo2 = transforms.Compose([
transforms.RandomResizedCrop(224, scale=global_crops_scale, interpolation=Image.BICUBIC),
flip_and_color_jitter,
utils.GaussianBlur(0.1), # 高斯模糊(概率 10%)
utils.Solarization(0.2), # 以 20% 概率进行太阳化增强(反转亮部)
normalize,
])
# ----------- 局部裁剪 -----------
self.local_crops_number = local_crops_number # 局部裁剪数量
self.local_transfo = transforms.Compose([
transforms.RandomResizedCrop(96, scale=local_crops_scale, interpolation=Image.BICUBIC),
flip_and_color_jitter,
utils.GaussianBlur(p=0.5), # 高斯模糊(概率 50%)
normalize,
])
def __call__(self, image):
"""
输入一张图像,返回多个增强后的 crop。
输出顺序:
[全局视角1, 全局视角2, 局部视角1, 局部视角2, ...]
"""
# 先生成两张全局 crop
crops = [self.global_transfo1(image), self.global_transfo2(image)]
# 再生成若干张局部 crop
for _ in range(self.local_crops_number):
crops.append(self.local_transfo(image))
return crops特别注意初始化方法中传入的 global_crops_scale 和 local_crops_scale 参数 :
# Multi-crop
parser.add_argument('--global_crops_scale', type=float, nargs='+', default=(0.4, 1.0),
help="Scale range for global crops.")
parser.add_argument('--local_crops_number', type=int, default=8,
help="Number of local crops (0 disables multi-crop).")
parser.add_argument('--local_crops_scale', type=float, nargs='+', default=(0.05, 0.4),
help="Scale range for local crops.")*_crops_scale 是 随机裁剪区域的相对尺度范围,即原始图像面积的比例。
参数形式:
*_crops_scale = (min_scale, max_scale)作用:控制 随机裁剪区域的最小和最大面积比例。
举例:
如果
global_crops_scale = (0.4, 1.0)随机裁剪的区域面积 ∈ [40%, 100%] 原图面积之间。
也就是说,有时裁掉少量边缘(接近原图),有时只取 40% 的图像内容(更聚焦)。
裁剪后再统一缩放到
224 × 224,作为模型输入。
由于 DINO 采用多视角图像输入,对于学生模型来说,一个批次图像经过增强后,会得到 2+n 个来自不同视角下的批次图像:

为了同时处理多视角图像输入,DINO 使用了 装饰器模式 ,设计 MultiCropWrapper 类来将输入图像批次列表按照分辨率进行分组:

[0,2) 区间对应
224分辨率 , [2,6) 对应96分辨率
将分辨率相同的批次合并后输入模型,拼接结果:

完整代码实现如下:
class MultiCropWrapper(nn.Module):
"""
一个封装类,用于处理多视角输入(multi-crop inputs)。
不同分辨率的输入会被分组,每一组在 backbone 中分别进行一次前向计算,
得到的特征拼接后再送入 head 中处理。
"""
def __init__(self, backbone, head):
super(MultiCropWrapper, self).__init__()
# 去掉 backbone 中原本为 ImageNet 分类准备的全连接层(fc, head)
# 因为这里是自监督学习,不需要类别分类器
backbone.fc, backbone.head = nn.Identity(), nn.Identity()
self.backbone = backbone # 特征提取网络
self.head = head # 投影头(projection head),用于后续对比学习
def forward(self, x):
# 保证输入是 list(多 crop 的场景可能传进来的是多个张量)
if not isinstance(x, list):
x = [x]
# 获取每个输入 crop 的分辨率(最后一个维度 size)
# torch.unique_consecutive 会返回连续相同值的唯一值及计数
# return_counts=True 表示返回每个唯一值的计数
# torch.cumsum 累积求和,得到每组 crop 的结束索引
idx_crops = torch.cumsum(torch.unique_consecutive(
torch.tensor([inp.shape[-1] for inp in x]), # 取每个 crop 的宽度
return_counts=True,
)[1], 0)
# 初始化
start_idx = 0
# 创建一个空 tensor 用于保存所有特征,放到和输入相同的 device 上
output = torch.empty(0).to(x[0].device)
# 遍历不同分辨率的分组
for end_idx in idx_crops:
# 将相同分辨率的 crop 拼接(batch 化),一起送入 backbone
_out = self.backbone(torch.cat(x[start_idx: end_idx]))
# 有些 backbone(如 XCiT)返回的是 tuple,这里只取第一个元素(主特征)
if isinstance(_out, tuple):
_out = _out[0]
# 将这一批特征拼接到输出中
output = torch.cat((output, _out))
# 更新下一个起始位置
start_idx = end_idx
# 所有特征拼接完成后,送入 head 得到最终表示
return self.head(output)下面我们来看 DINO 模型完整的训练流程:
def train_dino(args):
"""
在单进程下运行完整的 DINO 训练循环
步骤:
1. 构建多视图增强 (Multi-crop augmentations) 和数据集 / DataLoader
2. 构建学生 (Student) / 教师 (Teacher) 网络,并附加 DINO 头
3. 用学生初始化教师网络,教师梯度冻结
4. 创建损失函数、优化器及余弦调度器 (学习率、权重衰减、EMA momentum)
5. 标准 float32 训练循环,每轮迭代更新 EMA 教师参数
"""
# =====================
# 1. 数据准备
# =====================
# 构建 DINO 的多视图增强策略:2 个全局裁剪 + N 个局部裁剪
transform = DataAugmentationDINO(
args.global_crops_scale,
args.local_crops_scale,
args.local_crops_number,
)
# 使用 ImageFolder 数据集,要求目录结构为:
# data_path/class_x/*.jpg
# ImageFolder 会根据子文件夹名自动生成 class 索引,并返回 (PIL image, label)
dataset = datasets.ImageFolder(args.data_path, transform=transform)
# 创建 DataLoader
data_loader = torch.utils.data.DataLoader(
dataset,
shuffle=True, # 打乱数据顺序
batch_size=args.batch_size,
num_workers=args.num_workers, # 多线程加载数据
pin_memory=True, # CUDA 加速
drop_last=True, # 丢弃最后不足 batch 的数据
)
print(f"数据加载完成: {len(dataset)} 张图片. Batch size: {args.batch_size}")
# =====================
# 2. 构建学生/教师网络
# =====================
# 使用相同的骨干网络 (Backbone) 构建学生和教师,并附加 DINO head
student_backbone = vits.__dict__[args.arch](
patch_size=args.patch_size,
drop_path_rate=args.drop_path_rate # DropPath 用于正则化
)
teacher_backbone = vits.__dict__[args.arch](patch_size=args.patch_size)
embed_dim = student_backbone.embed_dim # ViT 输出 embedding 维度
# 构建学生网络 (Student) + DINO head
student = utils.MultiCropWrapper(
student_backbone,
DINOHead(
embed_dim,
args.out_dim,
use_bn=args.use_bn_in_head, # 是否在 head 使用 BN
norm_last_layer=args.norm_last_layer, # 是否规范化最后一层
)
)
# 构建教师网络 (Teacher) + DINO head
teacher = utils.MultiCropWrapper(
teacher_backbone,
DINOHead(embed_dim, args.out_dim, args.use_bn_in_head),
)
# =====================
# 3. 初始化教师网络
# =====================
# 教师网络初始参数与学生网络相同
teacher.load_state_dict(student.state_dict())
# 教师网络不参与梯度更新,仅通过 EMA 更新参数
for p in teacher.parameters():
p.requires_grad = False
print(f"学生/教师网络构建完成: arch={args.arch}, embed_dim={embed_dim}")
# =====================
# 4. 构建 DINO 损失函数
# =====================
# DINOLoss 接收学生输出、教师输出和当前 epoch 信息
dino_loss = DINOLoss(
args.out_dim,
args.local_crops_number + 2, # 总视图数量: 2 个全局 + N 个局部
args.warmup_teacher_temp,
args.teacher_temp,
args.warmup_teacher_temp_epochs,
args.epochs,
)
# =====================
# 5. 构建优化器
# =====================
# 对参数进行分组:对 bias / norm 等不使用 weight decay
params_groups = utils.get_params_groups(student)
optimizer = torch.optim.AdamW(params_groups)
# =====================
# 6. 学习率、权重衰减、EMA momentum 调度器
# =====================
# 使用余弦调度器,按迭代次数调整
base_lr = args.lr * (args.batch_size / 256.0) # 学习率按 batch_size 线性缩放
lr_schedule = utils.cosine_scheduler(
base_lr, args.min_lr, args.epochs, len(data_loader),
warmup_epochs=args.warmup_epochs,
)
wd_schedule = utils.cosine_scheduler(
args.weight_decay, args.weight_decay_end, args.epochs, len(data_loader),
)
momentum_schedule = utils.cosine_scheduler(
args.momentum_teacher, 1.0, args.epochs, len(data_loader)
)
# =====================
# 7. 训练循环
# =====================
for epoch in range(args.epochs):
student.train() # 学生网络训练模式
teacher.train() # 教师网络不更新梯度,但 train 模式保持 BN 行为
for it, (images, _) in enumerate(data_loader):
# ---------------------
# 每次迭代更新学习率和权重衰减
# ---------------------
gid = it + epoch * len(data_loader) # 全局迭代索引
for i, pg in enumerate(optimizer.param_groups):
pg["lr"] = lr_schedule[gid]
if i == 0:
pg["weight_decay"] = wd_schedule[gid]
# ---------------------
# 前向计算 + 损失
# 教师网络只看 2 个全局裁剪
# 学生网络看所有裁剪 (2 个全局 + N 个局部)
# ---------------------
teacher_output = teacher(images[:2]) # 仅前 2 个全局裁剪
student_output = student(images) # 所有裁剪
loss = dino_loss(student_output, teacher_output, epoch)
# ---------------------
# 反向传播 (仅学生网络)
# ---------------------
optimizer.zero_grad()
loss.backward()
# 训练初期冻结学生网络最后一层
utils.cancel_gradients_last_layer(epoch, student, args.freeze_last_layer)
# 更新学生网络参数
optimizer.step()
# ---------------------
# EMA 更新教师网络参数
# ---------------------
with torch.no_grad():
m = momentum_schedule[gid] # 当前迭代 EMA momentum
for ps, pt in zip(student.parameters(), teacher.parameters()):
pt.data.mul_(m).add_((1 - m) * ps.detach().data)DINOHead 将 [CLS] token 投影到 65536 维空间,是为了:
增强训练稳定性(避免塌缩)。
分离“表征空间”和“对比空间”。
通过超大维度的“语义字典”让模型学习更细粒度、更丰富的表征。
部分代码细节没有详细介绍,大家请自行阅读源代码
最后来看一下 DINOLoss 类的实现:
class DINOLoss(nn.Module):
"""
DINO 损失函数类,支持温度调度、中心化(center)和多视图(crop)处理。
功能说明:
- 对教师输出进行温度锐化(sharpening),并维护一个移动中心(center)
来稳定训练。
- 计算跨视图的交叉熵损失:每个教师的全局视图监督所有学生视图,
但不监督与其索引相同的学生视图。
"""
def __init__(self, out_dim, ncrops, warmup_teacher_temp, teacher_temp,
warmup_teacher_temp_epochs, nepochs, student_temp=0.1,
center_momentum=0.9):
super().__init__()
self.student_temp = student_temp # 学生输出 softmax 的温度
self.center_momentum = center_momentum # 中心更新的 EMA 动量
self.ncrops = ncrops # 输入图像裁剪数量
self.register_buffer("center", torch.zeros(1, out_dim)) # 初始化教师输出中心向量
# 教师温度调度表
# 前 warmup_teacher_temp_epochs 采用线性增长,从 warmup_teacher_temp 到 teacher_temp
# 后续 epoch 固定为 teacher_temp
self.teacher_temp_schedule = np.concatenate((
np.linspace(warmup_teacher_temp, teacher_temp, warmup_teacher_temp_epochs),
np.ones(nepochs - warmup_teacher_temp_epochs) * teacher_temp
))
def forward(self, student_output, teacher_output, epoch):
"""
计算跨视图交叉熵损失。
输入:
- student_output: 学生模型输出,包含所有裁剪的拼接结果
- teacher_output: 教师模型输出,仅包含全局视图
- epoch: 当前训练轮数,用于教师温度调度
处理流程:
1. 学生输出按温度缩放并拆分为每个裁剪的输出
2. 教师输出减去中心并进行温度锐化
3. 每个教师视图监督除同索引学生视图外的所有学生视图
"""
# 学生输出按温度缩放,并拆分为 ncrops 个裁剪
student_out = student_output / self.student_temp
student_out = student_out.chunk(self.ncrops)
# 教师输出:减去中心并进行温度锐化
temp = self.teacher_temp_schedule[epoch] # 当前 epoch 的教师温度
teacher_out = F.softmax((teacher_output - self.center) / temp, dim=-1)
teacher_out = teacher_out.detach().chunk(2) # 仅两张全局裁剪用于教师监督
total_loss = 0 # 总损失
n_loss_terms = 0 # 用于计算平均损失的项数
# 遍历每个教师视图
for iq, q in enumerate(teacher_out):
# 遍历每个学生视图
for v in range(len(student_out)):
if v == iq: # 不监督同索引的学生视图
continue
# 计算交叉熵损失
loss = torch.sum(-q * F.log_softmax(student_out[v], dim=-1), dim=-1)
total_loss += loss.mean()
n_loss_terms += 1
# 对所有损失求平均
total_loss /= n_loss_terms
# 更新教师输出中心
self.update_center(teacher_output)
return total_loss
@torch.no_grad()
def update_center(self, teacher_output):
"""
使用当前 batch 教师输出更新 EMA 中心
公式:
center = center * center_momentum + batch_center * (1 - center_momentum)
"""
batch_center = teacher_output.mean(dim=0, keepdim=True) # 计算 batch 中心
self.center = self.center * self.center_momentum + batch_center * (1 - self.center_momentum)DINO 不对同索引的学生视图进行监督,是为了 避免学生只学到平凡的输入匹配,强制学生跨视图对齐,才能让表示真正学到 语义一致性,而不是表面相似性。