BEiT v2: Masked Image Modeling with Vector-Quantized Visual Tokenizers 论文解读
论文链接: BEiT v2: Masked Image Modeling with Vector-Quantized Visual Tokenizers
代码链接: https://github.com/microsoft/unilm/tree/master/beit2
引言
掩码图像建模(MIM)通过恢复被掩码的图像块,能够在自监督学习中捕捉丰富的上下文信息,但大多数方法仅在低层像素上操作。
现有重建目标可以分为三类:
低层图像元素(如原始像素)
手工特征(如 HOG 特征)
视觉 token
这些方法大多忽略了高层语义信息,而语言模型中的掩码词都是高层语义,这启发了 MIM 可以借助语义感知监督进行改进。
BEIT V2 提出 向量量化知识蒸馏(VQ-KD),将连续的语义空间离散化为紧凑的视觉 token。VQ-KD 训练过程:
编码器将输入图像转为离散 token,基于可学习码本(codebook)。
解码器根据教师模型编码的语义特征重建图像特征。
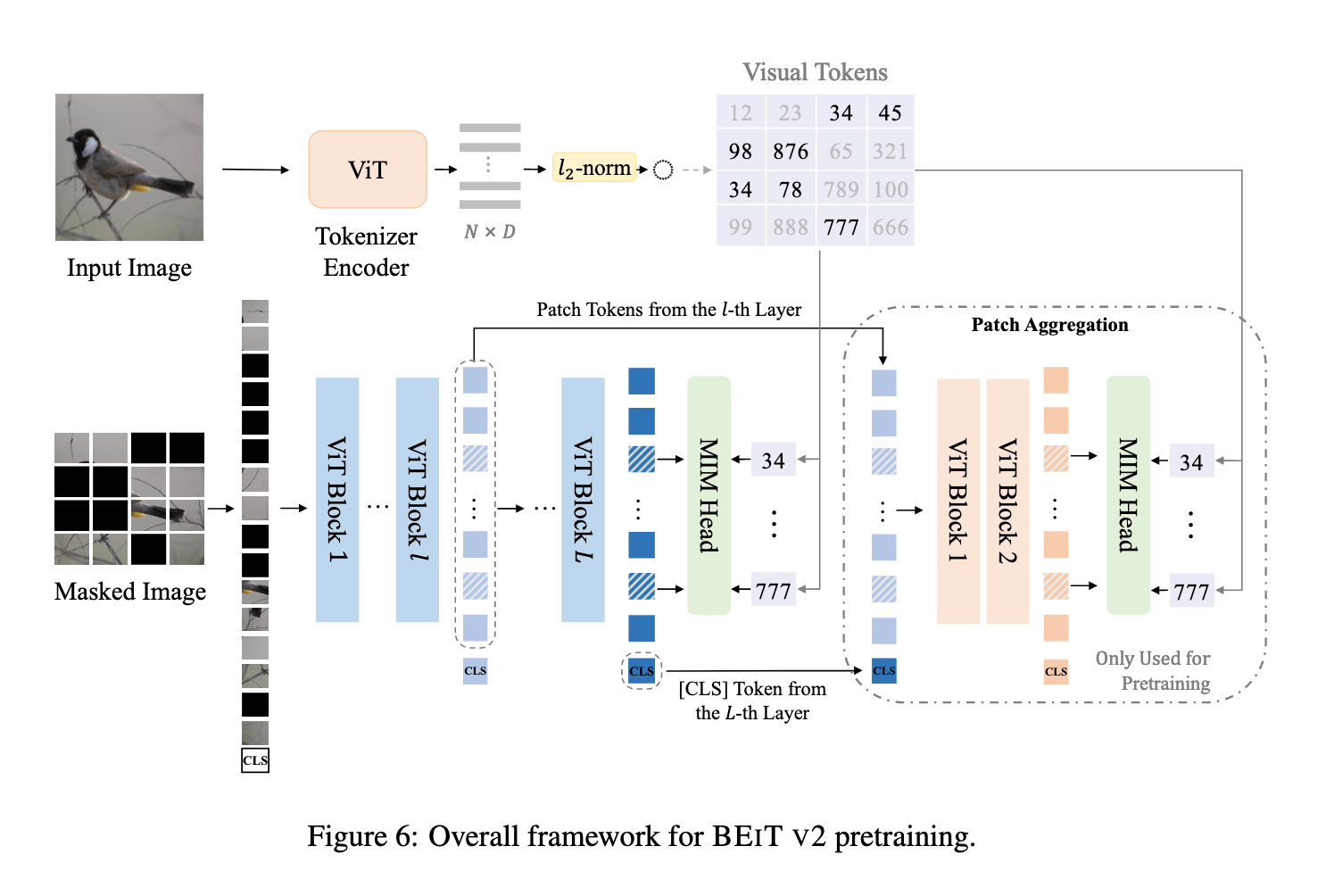
训练完成后,VQ-KD 的编码器被用作 BEIT V2 的语义视觉分词器,离散 token 作为监督信号进行 MIM 预训练。引入 图像块聚合策略,让 [CLS] token 聚合全局信息,解决传统 MIM 过度关注局部块重建而忽略全局表示的问题。
方法
预训练阶段一: 向量量化知识蒸馏算法用于d-VAE预训练
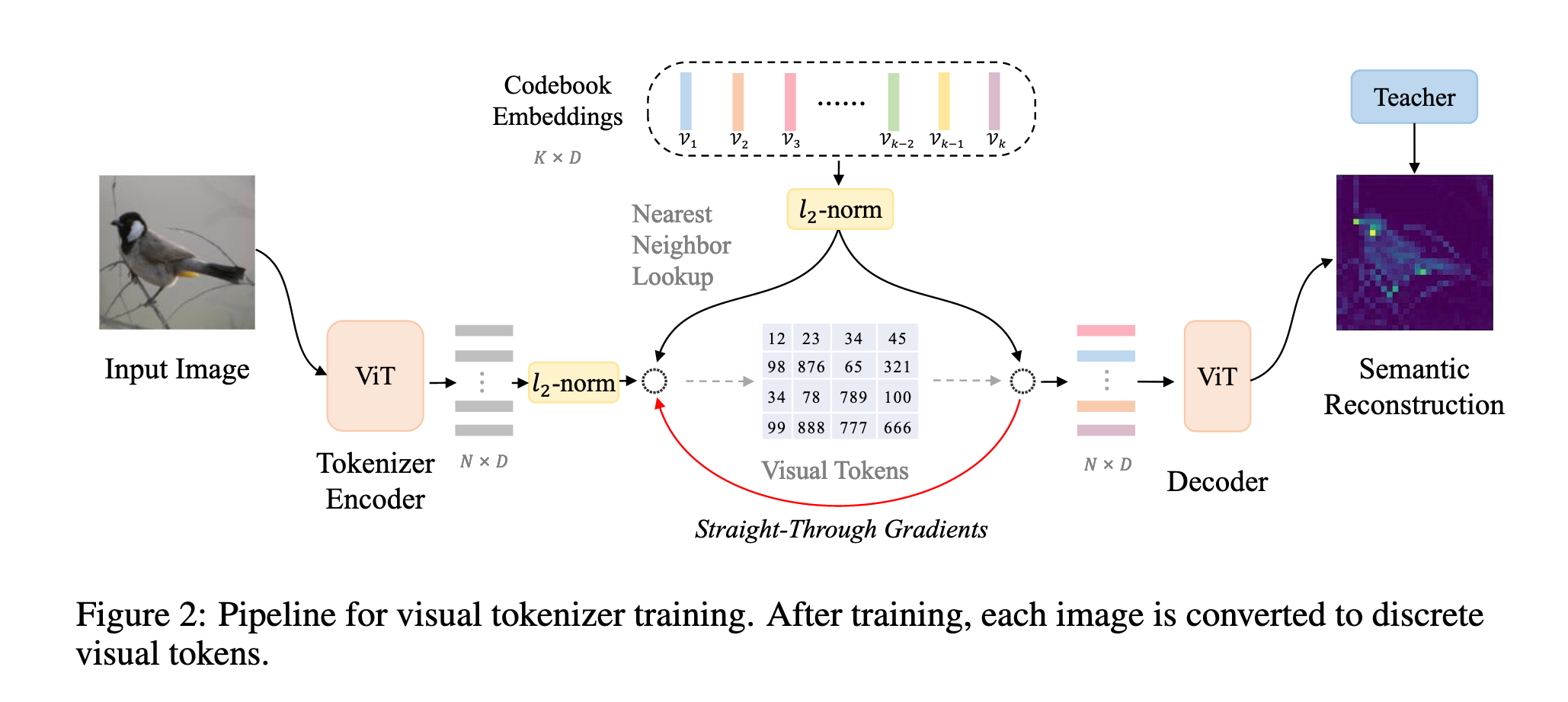
BEIT V2 继承了 BEIT 的掩码图像建模(Masked Image Modeling)框架,其核心思想是将每张图像通过视觉 tokenizer 转换为一组离散的视觉 token,然后训练模型去恢复被遮挡的 token。每个 token 对应图像中的一个 patch,从而实现对局部图像信息的建模(如图 2 所示)。训练过程中,引入了向量量化知识蒸馏(VQ-KD)算法,用于训练视觉 tokenizer,使其能够有效将图像映射到离散编码。
图像表示部分,输入图像
在 VQ-KD 训练中,视觉 tokenizer 由编码器和量化器组成:
编码器将图像转换为 patch 表征
量化器在代码本
其中
其中
向量量化训练中常见问题是代码本塌陷(codebook collapse),即只使用少量编码。为缓解此问题,VQ-KD 使用经验策略:
查找最近邻时对代码本嵌入进行
在输入 decoder 前将低维嵌入映射回高维空间;
代码本嵌入使用指数移动平均(EMA)更新,EMA 能更稳定地追踪模型训练动态。
整体而言,BEIT V2 结合视觉 tokenizer、VQ-KD 和 Transformer 架构,通过 patch 级别的离散表示学习与教师特征对齐,实现对图像语义信息的高效编码与预训练。
代码实现
关于阶段一的预训练过程,我们先来看 cookbook 的代码实现,由于 BEiT-V2 采用 EMA(指数平均移动) 来对码本的状态参数进行缓慢更新,所以代码实现方面会维护一些额外的状态参数:
class EmbeddingEMA(nn.Module):
def __init__(self, num_tokens, codebook_dim, decay=0.99, eps=1e-5,
kmeans_init=True, codebook_init_path=''):
"""
向量量化的 codebook(码本)管理类,采用 EMA(指数滑动平均)进行更新。
参数:
- num_tokens: 码本的向量个数(即字典大小)
- codebook_dim: 每个向量的维度
- decay: EMA 的衰减系数
- eps: 避免数值错误的小常数
- kmeans_init: 是否使用 k-means 初始化
- codebook_init_path: 若提供,则从已有 checkpoint 加载初始化码本
"""
super().__init__()
self.num_tokens = num_tokens
self.codebook_dim = codebook_dim
self.decay = decay
self.eps = eps
# ========== 初始化权重 ==========
if codebook_init_path == '': # 如果没有提供预训练的 codebook
if not kmeans_init:
# 随机初始化,并做 L2 归一化,保证每个 embedding 向量长度为 1
weight = torch.randn(num_tokens, codebook_dim)
weight = l2norm(weight)
else:
# 若选择 kmeans_init,则先用全零矩阵占位,稍后再通过 k-means 初始化
weight = torch.zeros(num_tokens, codebook_dim)
# 标记是否完成初始化(True=已初始化,False=未初始化)
self.register_buffer('initted', torch.Tensor([not kmeans_init]))
else:
# 如果给定路径,则直接加载预训练的 codebook 权重
print(f"load init codebook weight from {codebook_init_path}")
codebook_ckpt_weight = torch.load(codebook_init_path, map_location='cpu')
weight = codebook_ckpt_weight.clone()
self.register_buffer('initted', torch.Tensor([True]))
# ========== 需要维护的参数 ==========
# codebook 权重(不参与梯度更新,使用 EMA 更新)
self.weight = nn.Parameter(weight, requires_grad = False)
# 每个 cluster 的大小(计数),用来做 EMA 更新
self.cluster_size = nn.Parameter(torch.zeros(num_tokens), requires_grad = False)
# 每个 cluster embedding 的均值,用于 EMA 更新
self.embed_avg = nn.Parameter(weight.clone(), requires_grad = False)
# 是否启用更新
self.update = Truecookbook 初始化过程大体含有两个阶段: 码本权重初始化; 状态参数初始化; BEiT-V2 针对码本权重的初始化还做了特别的优化,我们可以打开 kmeans_init 开关,让码本延迟到首次向量量化阶段,采用 k-means 算法对 encoder 输出的特征向量做聚类迭代,得到 num_tokens 个簇中心来作为码本的初始化向量。
这样做的好处是:
避免了随机初始化导致的码本塌陷问题;
利用了
encoder输出的特征分布信息,使得码本初始化更加合理。
代码实现如下:
@torch.jit.ignore
def init_embed_(self, data):
"""
用 k-means 对码本进行初始化。
- data: encoder 输出的样本数据 (N, D)
"""
if self.initted: # 若已初始化,则跳过
return
print("Performing K-means init for codebook")
# 调用 kmeans 获取初始的 cluster 中心和 cluster 大小
embed, cluster_size = kmeans(data, self.num_tokens, 10, use_cosine_sim = True)
# 更新权重和 cluster_size
self.weight.data.copy_(embed)
self.cluster_size.data.copy_(cluster_size)
# 设置为已初始化状态
self.initted.data.copy_(torch.Tensor([True]))k-means 的计算步骤可以总结为以下几个核心环节:
初始化簇中心
- 从样本中随机选取
num_clusters个向量作为初始中心,或者使用其他方法(如 k-means++)。
- 从样本中随机选取
计算样本与中心的距离/相似度
- 对每个样本计算它与所有簇中心的距离(欧氏距离)或相似度(余弦相似度)。
样本分配
- 将每个样本分配到最近的簇(或相似度最高的簇),形成簇成员集合。
统计簇信息
- 统计每个簇的样本数量(用于更新中心和处理空簇)。
更新簇中心
对每个簇,将簇内样本向量求平均,得到新的中心。
若某簇为空,则保留原中心不变。
如果使用余弦相似度,更新后的中心需要做 L2 归一化。
迭代
- 重复步骤 2–5,直到达到预定迭代次数或收敛条件。
输出结果
- 返回最终的簇中心和每个簇的样本数。
这整个过程就是 k-means 聚类的标准迭代流程:分配 → 更新 → 循环 , 具体代码实现如下:
def kmeans(samples, num_clusters, num_iters = 10, use_cosine_sim = False):
# samples: 输入样本,形状 (N, D),N 是样本数,D 是维度
# num_clusters: 聚类簇数,即要分成多少类
# num_iters: k-means 的迭代次数
# use_cosine_sim: 是否用余弦相似度(默认用欧氏距离)
# 提取样本维度、数据类型和设备
dim, dtype, device = samples.shape[-1], samples.dtype, samples.device
# 从样本中随机选取 num_clusters 个向量作为初始中心
means = sample_vectors(samples, num_clusters)
# 重复迭代更新聚类中心
for _ in range(num_iters):
if use_cosine_sim:
# 使用余弦相似度:直接点积即可(因为向量一般做过 l2norm)
# 结果 shape: (N, K),表示每个样本和每个中心的相似度
dists = samples @ means.t()
else:
# 使用欧氏距离: (x - μ)^2
# diffs: (N, 1, D) - (1, K, D) = (N, K, D)
diffs = rearrange(samples, 'n d -> n () d') \
- rearrange(means, 'c d -> () c d')
# 计算平方距离并取负号(因为后面要用 max 来找最近中心)
dists = -(diffs ** 2).sum(dim = -1) # shape: (N, K)
# 找到每个样本最近的中心(或相似度最大的中心)
# buckets: (N,) 每个样本对应的簇编号
buckets = dists.max(dim = -1).indices
# 统计每个簇的样本数量
bins = torch.bincount(buckets, minlength = num_clusters) # (K,)
# 标记哪些簇没有分配到样本(空簇)
zero_mask = bins == 0
# 防止除以 0,把空簇的计数临时设为 1
bins_min_clamped = bins.masked_fill(zero_mask, 1)
# 初始化新的簇中心 (K, D),全部为 0
new_means = buckets.new_zeros(num_clusters, dim, dtype = dtype)
# 把属于同一簇的样本向量加到对应的中心上
# repeat(buckets, 'n -> n d', d = dim): 把 (N,) 扩展成 (N, D),方便 scatter_add
new_means.scatter_add_(0, repeat(buckets, 'n -> n d', d = dim), samples)
# 除以该簇的样本数,得到新的簇中心
new_means = new_means / bins_min_clamped[..., None]
# 如果用余弦相似度,记得对中心做 l2norm 归一化
if use_cosine_sim:
new_means = l2norm(new_means)
# 更新簇中心:
# - 如果该簇是空簇(zero_mask=True),保留旧的中心
# - 否则更新为新的中心
means = torch.where(zero_mask[..., None], means, new_means)
# 返回最终的簇中心和每个簇的样本数
return means, bins向量量化器负责将连续的视觉特征映射到离散的视觉 token,该过程借助内部维护的 cookbook 完成,本节我们来详细解析一下它的实现逻辑:
class NormEMAVectorQuantizer(nn.Module):
def __init__(self, n_embed, embedding_dim, beta, decay=0.99, eps=1e-5,
statistic_code_usage=True, kmeans_init=False, codebook_init_path=''):
super().__init__()
# codebook 向量的维度(即每个 embedding 的维数)
self.codebook_dim = embedding_dim
# codebook 的大小(有多少个离散 token)
self.num_tokens = n_embed
# commitment loss 的权重系数
self.beta = beta
# EMA 更新的衰减系数
self.decay = decay
# codebook,使用 EMA 更新(非梯度更新)
# 这里的 EmbeddingEMA 类负责存储和更新 codebook 向量
# 参数:
# - num_tokens: codebook 的大小
# - codebook_dim: 每个向量的维度
# - decay, eps: EMA 更新超参
# - kmeans_init: 是否用 k-means 初始化 codebook
# - codebook_init_path: 是否从文件加载已有的 codebook
self.embedding = EmbeddingEMA(
self.num_tokens,
self.codebook_dim,
decay,
eps,
kmeans_init,
codebook_init_path
)
# 是否统计每个 code 的使用频率(防止 dead code)
self.statistic_code_usage = statistic_code_usage
if statistic_code_usage:
# cluster_size 用来存储每个 code 的使用计数,注册为 buffer,随模型保存
self.register_buffer('cluster_size', torch.zeros(n_embed))向量量化器的前向传播过程负责将 encoder 编码得到的特征图 z 映射到离散的视觉 token 上,具体过程如下:
def forward(self, z):
"""
前向传播函数,实现向量量化(Vector Quantization)和 EMA 更新
参数:
- z: 输入特征图, shape (batch, channel, height, width)
返回:
- z_q: 量化后的特征图,shape 同输入
- loss: 量化损失
- encoding_indices: 每个向量对应的码本索引
"""
# 将输入从 (B, C, H, W) 转换为 (B, H, W, C) 以便处理通道维
z = rearrange(z, 'b c h w -> b h w c')
# L2 归一化
z = l2norm(z)
# 展平特征图,每一行对应一个向量 (num_vectors, embedding_dim)
z_flattened = z.reshape(-1, self.codebook_dim)
# 初始化码本(如果需要)
self.embedding.init_embed_(z_flattened)
# 计算每个向量与码本中所有向量的欧氏距离平方
d = z_flattened.pow(2).sum(dim=1, keepdim=True) + \
self.embedding.weight.pow(2).sum(dim=1) - 2 * \
torch.einsum('bd,nd->bn', z_flattened, self.embedding.weight) # 'n d -> d n'
# 为每个向量找到最近的码本索引
encoding_indices = torch.argmin(d, dim=1)
# 将编码索引映射回码本向量并 reshape 成原来的特征图形状
z_q = self.embedding(encoding_indices).view(z.shape)
# one-hot 编码
encodings = F.one_hot(encoding_indices, self.num_tokens).type(z.dtype)
# 非训练模式下统计码本使用情况
if not self.training:
with torch.no_grad():
cluster_size = encodings.sum(0)
self.all_reduce_fn(cluster_size) # 分布式同步
ema_inplace(self.cluster_size, cluster_size, self.decay)
# 训练模式下更新 EMA 码本
if self.training and self.embedding.update:
bins = encodings.sum(0)
self.all_reduce_fn(bins)
# 更新 cluster_size 的 EMA
ema_inplace(self.cluster_size, bins, self.decay)
# 避免除零
zero_mask = (bins == 0)
bins = bins.masked_fill(zero_mask, 1.)
# 计算每个码本向量的累加特征
embed_sum = z_flattened.t() @ encodings
self.all_reduce_fn(embed_sum)
# 归一化并 L2 正则化
embed_normalized = (embed_sum / bins.unsqueeze(0)).t()
embed_normalized = l2norm(embed_normalized)
# 对未使用的码本向量保持原值
embed_normalized = torch.where(zero_mask[..., None], self.embedding.weight,
embed_normalized)
# 更新 EMA 码本权重
norm_ema_inplace(self.embedding.weight, embed_normalized, self.decay)
# 量化损失 --- 只对encoder进行更新,cookbook不采用梯度回传更新
loss = self.beta * F.mse_loss(z_q.detach(), z)
# 保留梯度 --- 用于后续重建损失,梯度可以沿着直接通路回传回encoder进行更新
z_q = z + (z_q - z).detach()
# reshape 回原始输入形状 (B, C, H, W)
z_q = rearrange(z_q, 'b h w c -> b c h w')
return z_q, loss, encoding_indices前向传播的过程中,向量量化器还完成了对码本相关状态参数的更新,更新算法为: EMA(指数平均移动更新)。
def ema_inplace(moving_avg, new, decay):
moving_avg.data.mul_(decay).add_(new, alpha = (1 - decay))关于码本向量的更新流程就是 计算每个 codebook 的新的簇中心:
用
encodings把属于同一个 codebook 的样本挑出来把这些样本向量累加 → 得到
embed_sum除以该 codebook 的样本数量 → 得到均值
均值向量就作为 新的 codebook 向量(簇中心)用于 EMA 更新
简而言之,这一步就是 “统计簇内所有样本 → 计算簇中心” 的操作。
最后讲解一下上面代码最后的两处梯度卸载操作:
# 量化损失 --- 只对encoder进行更新,cookbook不采用梯度回传更新
loss = self.beta * F.mse_loss(z_q.detach(), z)MSE 公式展开如下:
反向梯度:
encoder 输出
codebook 不通过梯度更新,EMA 更新独立
# 保留梯度 --- 用于后续重建损失,梯度可以沿着直接通路回传回encoder进行更新
z_q = z + (z_q - z).detach()z_q 被更新后,后面参与了重建损失的计算,梯度回传的时候,(z_q - z).detach() 这部分被当作了常量,计算图认为对学习任务的贡献全部来源于 z ,但实际上前向传播阶段的贡献来源于z_q,这相当于使了一个障眼法。
最后我们来看一下 VQKD 模型的完整结构,首先从它的初始化方法入手:
class VQKD(nn.Module):
"""
VQKD (Vector-Quantized Knowledge Distillation) 模型
这是一个基于向量量化的知识蒸馏模型,用于学习图像的语义表示。
包含编码器、解码器、量化器和教师模型等组件。
"""
def __init__(self,
encoder_config, # 编码器配置参数
decoder_config, # 解码器配置参数
n_embed=8192, # 代码本大小(词汇表大小)
embed_dim=32, # 嵌入维度
decay=0.99, # EMA衰减率
process_type='default', # 图像预处理类型
quantize_kmeans_init=True, # 是否使用k-means初始化量化器
teacher_model_type='clip', # 教师模型类型(clip或dino)
decoder_out_dim=512, # 解码器输出维度
rec_loss_type='cosine', # 重建损失类型
**kwargs
):
super().__init__()
# 创建编码器和解码器
self.encoder = VisionTransformer(**encoder_config) # 使用Vision Transformer作为编码器
self.decoder = VisionTransformer(**decoder_config) # 使用Vision Transformer作为解码器
# 创建向量量化器
self.quantize = NormEMAVectorQuantizer(
n_embed=n_embed, embedding_dim=embed_dim, beta=1.0, kmeans_init=quantize_kmeans_init, decay=decay,
)
# 记录patch大小和token形状
self.patch_size = encoder_config['patch_size']
self.token_shape = (encoder_config['img_size'] // self.patch_size, encoder_config['img_size'] // self.patch_size)
## 教师模型设置
self.teacher_model_type = teacher_model_type
self.decoder_out_dim = decoder_out_dim
if self.teacher_model_type == 'clip':
# 使用CLIP作为教师模型
self.scaling_layer = ScalingLayerForClip() # CLIP专用的缩放层
self.teacher_model, _ = clip.load("ViT-B/16", device='cpu', jit=False) # 加载CLIP ViT-B/16模型
self.decoder_out_dim = 512 # CLIP输出维度为512
elif self.teacher_model_type == 'dino':
# 使用DINO作为教师模型
self.scaling_layer = ScalingLayerForIM() # DINO专用的缩放层
self.teacher_model = get_dino_vit_base() # 加载DINO ViT-Base模型
self.decoder_out_dim = 768 # DINO输出维度为768
else:
self.teacher_model = None
if self.teacher_model is not None:
# 冻结教师模型参数,不参与训练
for param in self.teacher_model.parameters():
param.requires_grad = False
self.teacher_model.eval() # 设置为评估模式
self.teacher_input_size = kwargs.get('teacher_input_size', 224)
# 任务特定层:用于调整特征维度
self.encode_task_layer = nn.Sequential(
nn.Linear(encoder_config['embed_dim'], encoder_config['embed_dim']), # 线性变换
nn.Tanh(), # 激活函数
nn.Linear(encoder_config['embed_dim'], embed_dim) # 映射到量化器维度
)
self.decode_task_layer = nn.Sequential(
nn.Linear(decoder_config['embed_dim'], decoder_config['embed_dim']), # 线性变换
nn.Tanh(), # 激活函数
nn.Linear(decoder_config['embed_dim'], self.decoder_out_dim), # 映射到教师模型输出维度
)
self.rec_loss_type = rec_loss_type
print(f"process type for VQKD: {process_type}")
self.process_type = process_type # 支持 'default', 'dall-e', 'imagenet_norm'
self.logit_laplace_eps = 0.1
self.kwargs = kwargs
# 初始化权重
self.encode_task_layer.apply(self._init_weights)
self.decode_task_layer.apply(self._init_weights)VQKD 模型的前向传播流程负责具体落地知识蒸馏算法的实现,也就是让 d-VAE 模型学会从教师模型中学会编码图像高级语义信息的能力:
def forward(self, x, **kwargs):
"""
前向传播函数
Args:
x: 输入图像,形状为 [B, 3, H, W],值域为 [0, 1]
Returns:
loss: 总损失
log: 损失日志
"""
x = self.pre_process(x) # 预处理图像到 [-1, 1] 范围
# 从教师模型获取目标特征
target = self.get_regress_target(x, **kwargs)
# 编码和解码
quantize, embed_ind, emb_loss = self.encode(x) # 编码得到量化结果
xrec = self.decode(quantize) # 解码重建特征
# 计算重建损失
rec_loss = self.calculate_rec_loss(xrec, target)
# 总损失 = 量化损失 + 重建损失
loss = emb_loss + rec_loss
# 记录损失日志
log = {}
split = "train" if self.training else "val"
log[f'{split}/quant_loss'] = emb_loss.detach().mean() # 量化损失
log[f'{split}/rec_loss'] = rec_loss.detach().mean() # 重建损失
log[f'{split}/total_loss'] = loss.detach().mean() # 总损失
return loss, log从教师模型获取先验知识的过程,就是将图像送入预训练好的图像编码器,如: CLIP 或 DINO 中,得到编码后的图像特征输出:
@torch.no_grad()
def get_regress_target(self, x, **kwargs):
"""
获取回归目标(从教师模型)
Args:
x: 输入图像
Returns:
target: 教师模型的特征表示
"""
# 使用缩放层预处理图像
norm_imgs = self.scaling_layer(x)
if self.teacher_model_type == 'clip':
# CLIP教师模型:编码图像并投影到特征空间
target = self.teacher_model.encode_image(norm_imgs, return_all_tokens=True) @ self.teacher_model.visual.proj
elif self.teacher_model_type == 'dino':
# DINO教师模型:前向传播获取特征
target = self.teacher_model.forward(norm_imgs, return_patch_tokens=True)
else:
raise NotImplementedError
return targetVQ-KD 模型提供了 encode 方法用于对输入图像进行编码,得到量化后的特征表示:
def encode(self, x):
"""
编码函数:将图像编码为量化的token
Args:
x: 输入图像
Returns:
quantize: 量化后的特征
embed_ind: 嵌入索引
loss: 量化损失
"""
# 使用编码器提取特征
encoder_features = self.encoder(x, return_patch_tokens=True)
# 通过任务层调整特征维度
with torch.cuda.amp.autocast(enabled=False):
to_quantizer_features = self.encode_task_layer(encoder_features.type_as(self.encode_task_layer[-1].weight))
# 重塑特征为空间维度
N = to_quantizer_features.shape[1]
h, w = int(math.sqrt(N)), int(math.sqrt(N))
to_quantizer_features = rearrange(to_quantizer_features, 'b (h w) c -> b c h w', h=h, w=w)
# 使用量化器进行向量量化
quantize, loss, embed_ind = self.quantize(to_quantizer_features)
return quantize, embed_ind, loss对应的还有 decode 方法,用于将量化后的特征解码为原始图像:
def decode(self, quantize, **kwargs):
"""
解码函数:将量化的token解码为重建特征
Args:
quantize: 量化的特征
Returns:
rec: 重建的特征
"""
# 使用解码器重建特征
decoder_features = self.decoder(quantize, return_patch_tokens=True)
# 通过任务层调整输出维度
rec = self.decode_task_layer(decoder_features)
return rec最后补充一下重建损失计算的代码实现,如下所示:
def calculate_rec_loss(self, rec, target):
"""
计算重建损失
Args:
rec: 重建的特征
target: 目标特征
Returns:
rec_loss: 重建损失值
"""
if self.rec_loss_type == 'cosine':
# 余弦相似度损失:将特征归一化后计算余弦距离
target = target / target.norm(dim=-1, keepdim=True)
rec = rec / rec.norm(dim=-1, keepdim=True)
rec_loss = (1 - (target * rec).sum(-1)).mean()
else:
raise NotImplementedError
return rec_loss预训练阶段二: 掩码图像建模学习目标用于BEiT预训练
BEiT V2 预训练采用了 掩码图像建模(MIM) 的策略,类似于 BEIT 原论文(Bao et al., 2022)。给定一张输入图像
其中
视觉 token 来自之前训练好的 tokenizer,为 MIM 自监督提供监督信号。MIM 的训练损失为:
其中
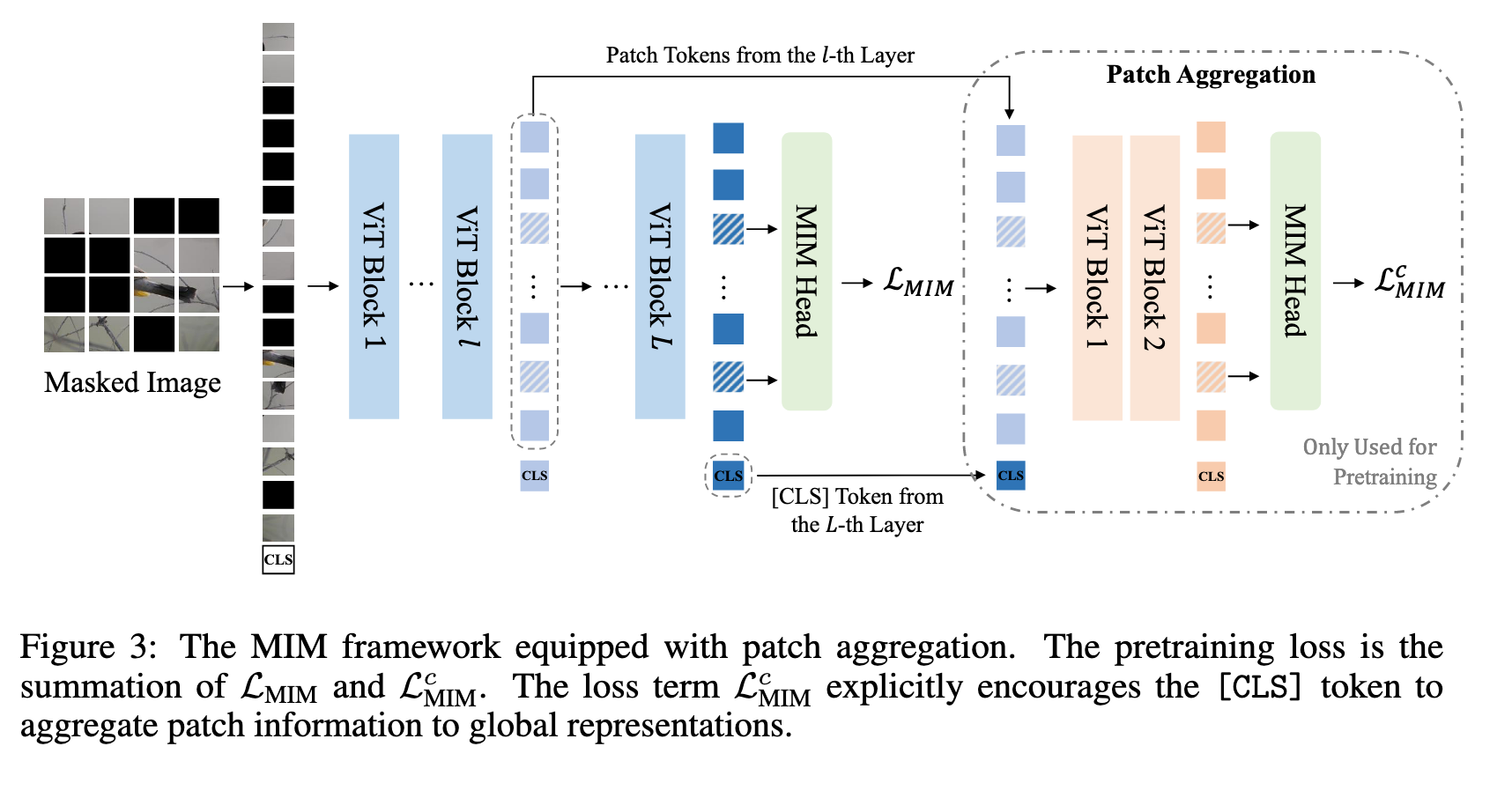
为了提升全局图像表征,BEiT V2 对 [CLS] token 进行了专门预训练,旨在缓解 patch 级预训练与图像级表示聚合之间的差异(如图3所示)。具体做法是为 [CLS] token 构建信息流 bottleneck,让其尽可能收集全局信息。对于 L 层 Transformer,第
然后输入浅层(如两层) Transformer decoder,再次进行遮挡预测:
MIM 头参数在两处共享,MIM 损失仍只在被遮挡位置计算。最终训练损失为两部分之和:第 L 层原始损失 + 浅层 decoder 的 MIM 损失。
这种设计的直观效果是模型会倾向于把全局信息推送到
patch 聚合策略个人理解: 通过 CLS token 聚合全局信息并参与浅层 patch token 的遮挡预测,实现全局信息对局部特征学习的反哺,从而提升 MIM 任务的预训练效果。
本节代码不算复杂,与 BEiT-V1 版本预训练过程有很多重合逻辑,因此这里就不再过多展开。
实验效果
码本设置(Visual Tokenizer / VQ-KD)对效果的影响:
使用 VQ-KD 训练视觉 tokenizer 时,码本大小(K)和向量维度(D)对重建性能和下游任务表现有直接影响。
解码器深度:
更深的解码器能够获得更好的重建质量,但会导致码本使用率下降,且下游任务性能降低
浅层解码器在下游任务上表现更好,说明浅层 decoder 更注重保留有用的全局/局部特征
码本维度调整:
- 降低码本向量维度可以提高码本利用率(codebook utilization),避免部分码本向量长期未被使用
教师模型影响:
DINO 监督训练的 VQ-KD,BEIT V2 在 ImageNet 和 ADE20K 上性能分别达到 84.4% 和 49.2%,显著高于教师模型
CLIP 监督训练也能带来一致提升,说明 VQ-KD 对不同教师模型具有良好的可扩展性
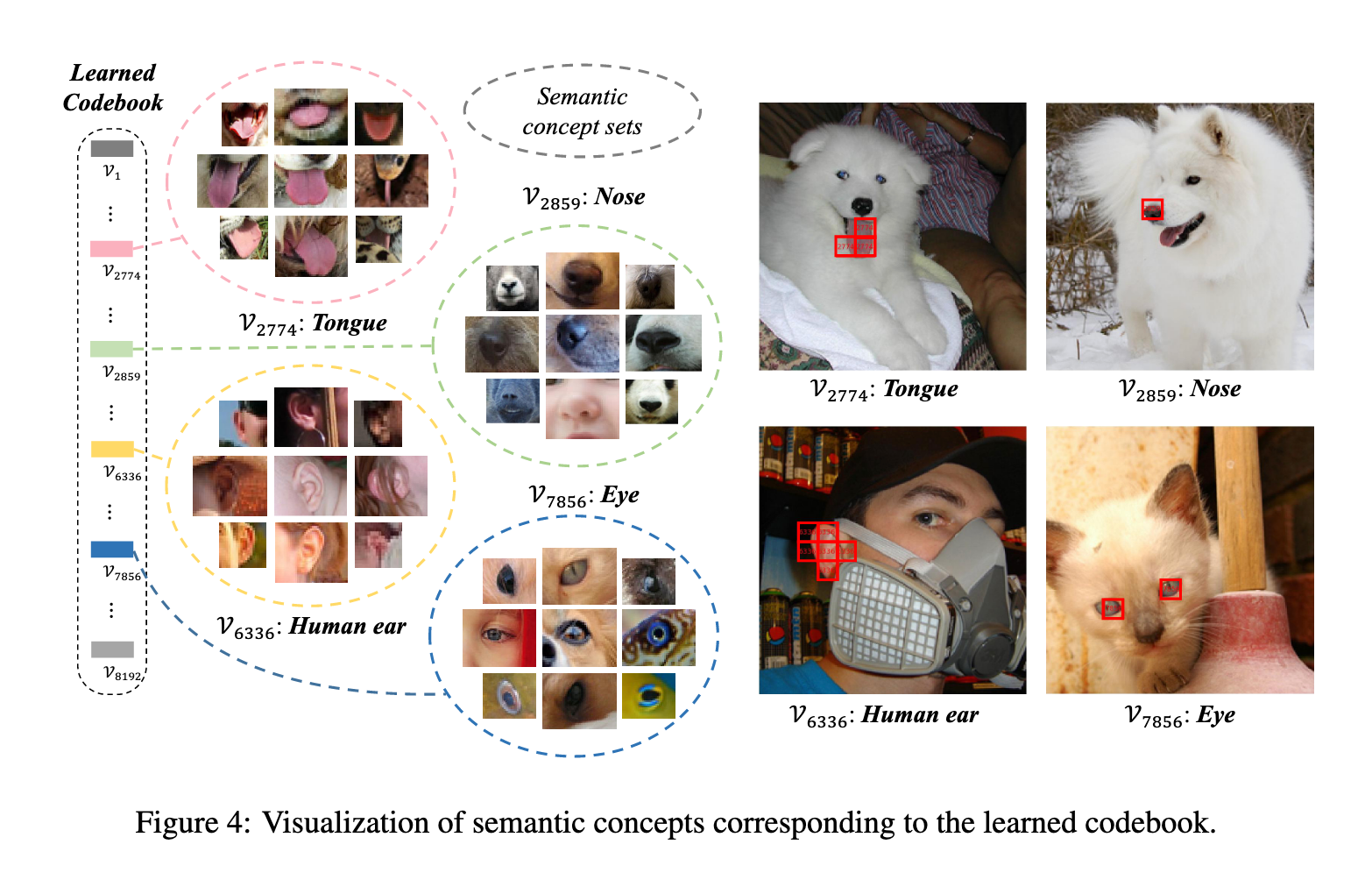
码本可视化(Figure 4):
同一码本向量对应的图像 patch 语义一致,例如代码 7856 对应“眼睛”相关 patch
码本和特征量化降低了对细节变化的敏感性,同时捕获高层语义,有助于预训练表征
Patch 聚合策略对效果的影响:
将中间层 patch 向量与最后一层 CLS token 拼接并输入浅层 decoder,有助于CLS token 聚合全局信息,从而提升遮挡 patch 的预测能力。
浅层 vs 深层 Patch 聚合头:
浅层头(1~2 层)比深层头(3 层)表现更好,原因是浅层更关注输入的 [CLS] token,有助于全局信息流向局部 patch
提升线性探测(linear probing)性能,说明全局表示更有效
MIM 头共享:
- 同时使用共享的 MIM head 可以进一步提升下游任务性能,增强模型对 patch 和图像整体的表征能力
总结:
码本设置(大小、维度、解码器深度、教师模型)直接影响重建质量、码本使用率以及下游任务性能
Patch 聚合策略通过 CLS token 汇聚全局信息并反哺 patch 预测,提高线性探测性能和下游任务效果
两者结合,VQ-KD + Patch 聚合策略,使 BEIT V2 在 ImageNet-1K 分类和 ADE20K 语义分割上取得显著提升
相关工作
视觉 Tokenizer:
VQ-VAE(van den Oord 等,2017)将图像转换为离散码序列,然后基于这些码重建图像。
DALL-E(Ramesh 等,2021)在量化过程中使用 Gumbel-softmax 松弛,而不是 VQ-VAE 的最近邻查找。
VQGAN(Esser 等,2021)和 ViT-VQGAN(Yu 等,2021)引入 Transformer 模块训练更好的自编码器,以保持图像细节,并使用对抗损失和感知损失。
ViT-VQGAN 还提出了分解式与 L2 归一化码本学习方法。
与此相比,VQ-KD 的目标不是重建像素,而是从教师模型中重建语义知识,从而构建一个高度紧凑的语义码本,用于 MIM 任务。
掩码图像建模(MIM):
MIM 方法在语言任务中取得成功(Devlin 等,2019;Dong 等,2019;Bao 等,2020),BEIT(Bao 等,2022)将其推广到计算机视觉,通过恢复离散视觉码作为预测目标。
最近的工作探索了不同的 MIM 预测目标:
MAE(He 等,2022)将 MIM 视为去噪的像素级重建任务。
知识蒸馏(Wei 等,2021, 2022)与自蒸馏(Baevski 等,2022)通过模仿教师在遮挡位置的特征提供监督。
PeCo(Dong 等,2021)利用 MoCo v3 作为 VQGAN 的感知模型,以训练更好的 tokenizer,用于 BEIT 预训练。
尽管取得进展,大多数现有方法仍基于低级像素,本工作探索如何将 MIM 从像素级提升到语义级。
总结
本文提出 向量量化知识蒸馏(VQ-KD),用于训练视觉 tokenizer 以支持 Vision Transformer 预训练。
VQ-KD 将连续语义空间离散化,为掩码图像建模提供语义级监督,而不依赖图像像素。
语义视觉 tokenizer 显著提升了 BEIT 的预训练效果,并在下游任务(如图像分类和语义分割)中提高了迁移性能。
引入 Patch 聚合机制,显式鼓励模型生成全局图像表示,缩小了 patch 级预训练与图像级表示聚合之间的差距。
未来工作方向:希望学习一个通用 tokenizer,将词与图像映射到同一词汇表,实现视觉-语言预训练的掩码预测。
补充
BEiT-V2 模型完整架构如下所示: