
Unsupervised Label Noise Modeling and Loss Correction 论文
论文链接: Unsupervised Label Noise Modeling and Loss Correction
代码链接: https://github.com/PaulAlbert31/LabelNoiseCorrection
引言
卷积神经网络(CNN)是计算机视觉任务中的主流方法,能够在有大量标注数据时建模复杂模式。但实际中获取大规模干净数据很困难,人工或自动标注往往会产生错误,形成噪声样本。
已有研究发现:
CNN 虽然对少量噪声有一定鲁棒性,但在随机梯度下降训练下,容易 拟合随机标签。
当同时存在干净和错误标签时,网络会先拟合干净样本,再逐步拟合噪声样本。
过拟合噪声会严重损害模型的泛化能力,也会加剧训练中的偏差问题(如类别不平衡)。
因此,如何在不丢弃噪声样本的前提下,避免网络过拟合错误标签,同时利用这些样本的潜在信息,成为一个关键挑战。
现有方法与不足:
损失校正类方法:
Bootstrapping loss(Reed 等, 2015)在目标函数中引入一致性约束,通过结合网络预测结果和原始标签,减少噪声的负面影响。
类别概率修正(Patrini 等, 2017; Hendrycks 等, 2018)通过估计每类的噪声分布,对损失进行调整,引导网络更靠近真实类别。
课程学习类方法:
通过“由易到难”的顺序训练(Bengio 等, 2009),在噪声场景中,易样本≈干净样本,难样本≈噪声样本,因此可以降低噪声样本对损失的贡献。
但简单丢弃噪声样本可能损失了关于数据分布的重要信息。
其他改进方法:
相似性学习(Wang 等, 2018b):将噪声样本的表示与干净样本拉开。
Mixup 数据增强(Zhang 等, 2018):无需显式建模噪声,却展现出对标签噪声的强鲁棒性。
然而,这些方法往往假设存在一部分干净数据,或者在利用噪声样本方面不够充分。
本文的核心思想与贡献:
本文提出一种新的训练流程,即使在高比例噪声下,也能避免过拟合错误标签,同时有效利用噪声样本:
通过对 样本损失分布 进行建模,提出 双成分 Beta 混合模型 (BMM),分别对应“干净样本”和“噪声样本”。
使用 BMM 的后验概率来动态调整 bootstrapping loss,从而实现对每个样本的损失校正。
在不丢弃噪声样本的情况下,保持训练鲁棒性,并能学习到有利的表征。
将方法与 mixup 数据增强 结合,进一步提升性能,即便在极端噪声条件下依然能收敛。
主要贡献:
提出基于样本损失的无监督标签噪声建模方法。
提出结合该模型的损失校正策略,避免过拟合噪声标签。
将方法与 mixup 数据增强结合,推动了当前最优水平的提升。
在极端噪声水平下,依然能通过改进的 mixup 策略实现收敛。
相关工作
标签噪声的两类场景:
封闭集 (closed-set):所有样本(包括噪声样本)的真实标签都在已知集合
开放集 (open-set):某些噪声样本
本文主要关注 封闭集标签噪声,并在此场景下开展研究。
封闭集下的噪声类型:
均匀随机噪声(对称噪声):真实标签以相同概率被随机翻转到其他类别。
非均匀随机噪声(类别条件噪声):不同类别有不同的翻转概率。
已有研究(Patrini 等, 2017)表明:均匀噪声比非均匀噪声更难处理。
现有应对方法:
丢弃噪声样本
简单但有风险:难样本可能被误判为噪声样本。
尽管如此,研究(Ding 等, 2018)表明,丢弃高概率错误的样本并将它们用于半监督学习仍然有效。
重新标注样本
通过不同模型尝试恢复真实标签:
有向图模型 (Xiao 等, 2015)
条件随机场 (Vahdat, 2017)
CNN (Veit 等, 2017)
但这些方法普遍假设存在一小部分干净数据。Tanaka 等(2018)则证明,可以利用网络预测在无监督下进行重新标注,生成软标签或硬标签。
损失校正方法
通过修改损失函数或计算损失所需的概率来抵消噪声:
Reed 等(2015):在损失中加入感知一致性项,引入对模型预测的依赖,但噪声标签始终影响目标函数。
Patrini 等(2017):提出两种方法:
Backward 方法:利用噪声转移矩阵
Forward 方法:对预测概率进行修正,即用
Hendrycks 等(2018):基于在干净数据上训练的模型,计算腐蚀矩阵 (corruption matrix),并用它来修正预测概率。
基于重加权的课程学习
Jiang 等(2018b):提出“导师-学生”框架,导师网络学习课程(即样本权重),指导学生网络在噪声下训练。
Guo 等(2018):利用特征空间分布复杂度进行无监督估计,结合干净和噪声样本训练。
Ren 等(2018):根据训练梯度与验证集梯度的方向一致性来为样本加权。
这些方法与重新标注方法一样,通常依赖于一部分干净数据,限制了实际应用。
不依赖干净数据的方法:
- Wang 等(2018b):提出无监督的噪声检测方法,结合相似性学习,将噪声样本的表示与各类别的干净样本表示拉开,同时不丢弃噪声样本。
本文的区别与方法:
与现有方法不同,本文仅依赖 每个样本的训练损失,而无需任何干净数据。核心思路是:
对样本的损失分布拟合一个 双成分 Beta 混合模型 (BMM),分别建模干净样本与噪声样本。
利用 BMM 的后验概率,实现 损失校正。
方法结合 bootstrapping loss(Reed 等, 2015)与 mixup 数据增强(Zhang 等, 2018),从而更好地应对封闭集标签噪声场景。
方法
1. 标签噪声建模
图像分类被定义为从训练集
学习一个模型
当标签含有噪声时,样本
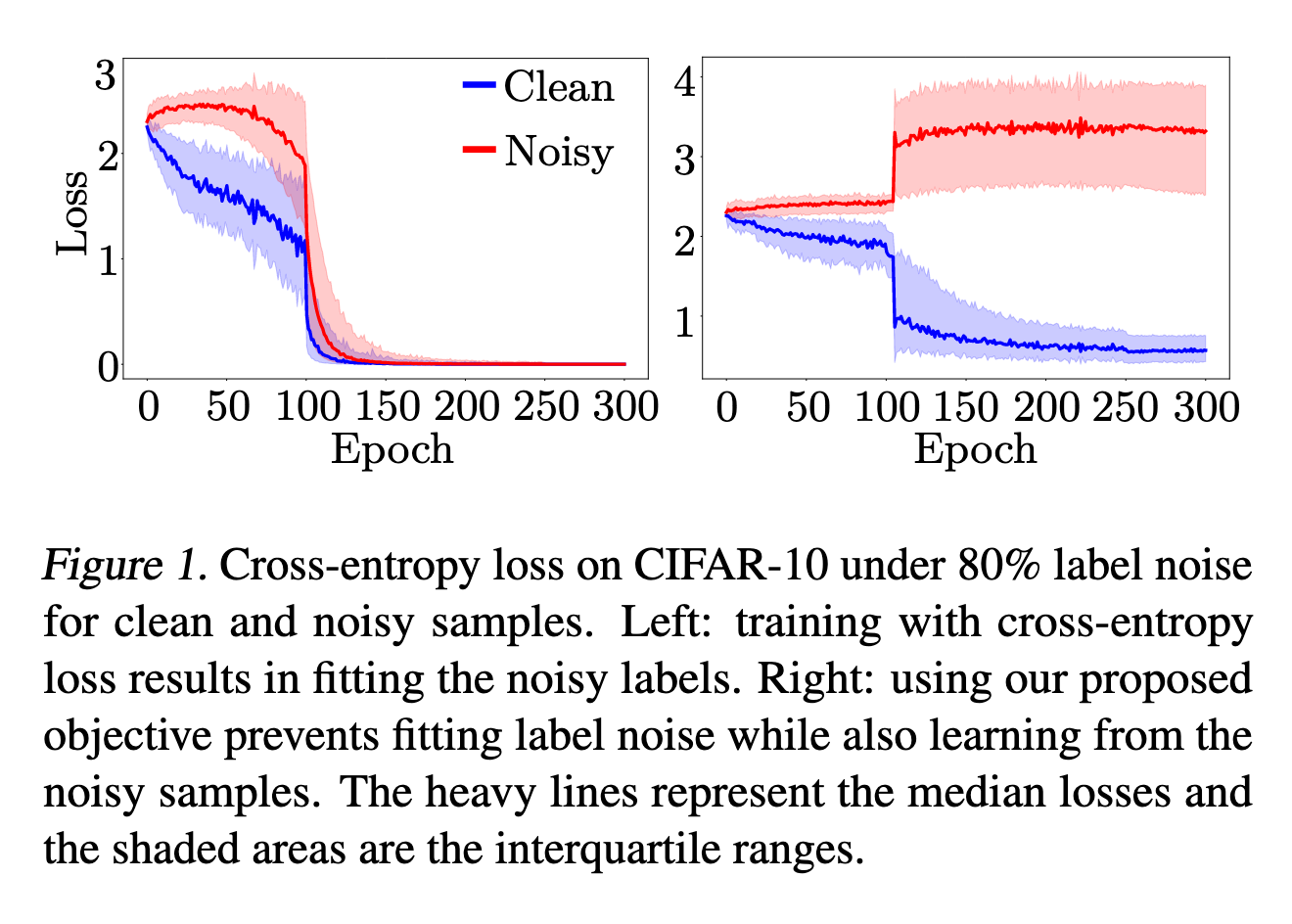
核心观察(见图1与图2):
随机错误标签比正确标签更难学,因此在训练早期,噪声样本的损失值更高。
CNN 在拟合干净样本后才逐渐拟合噪声样本。
因此,仅通过损失分布就能区分干净与噪声样本。
这启发了本文提出的:通过 混合模型 对损失分布建模,进而判别样本是否为噪声。
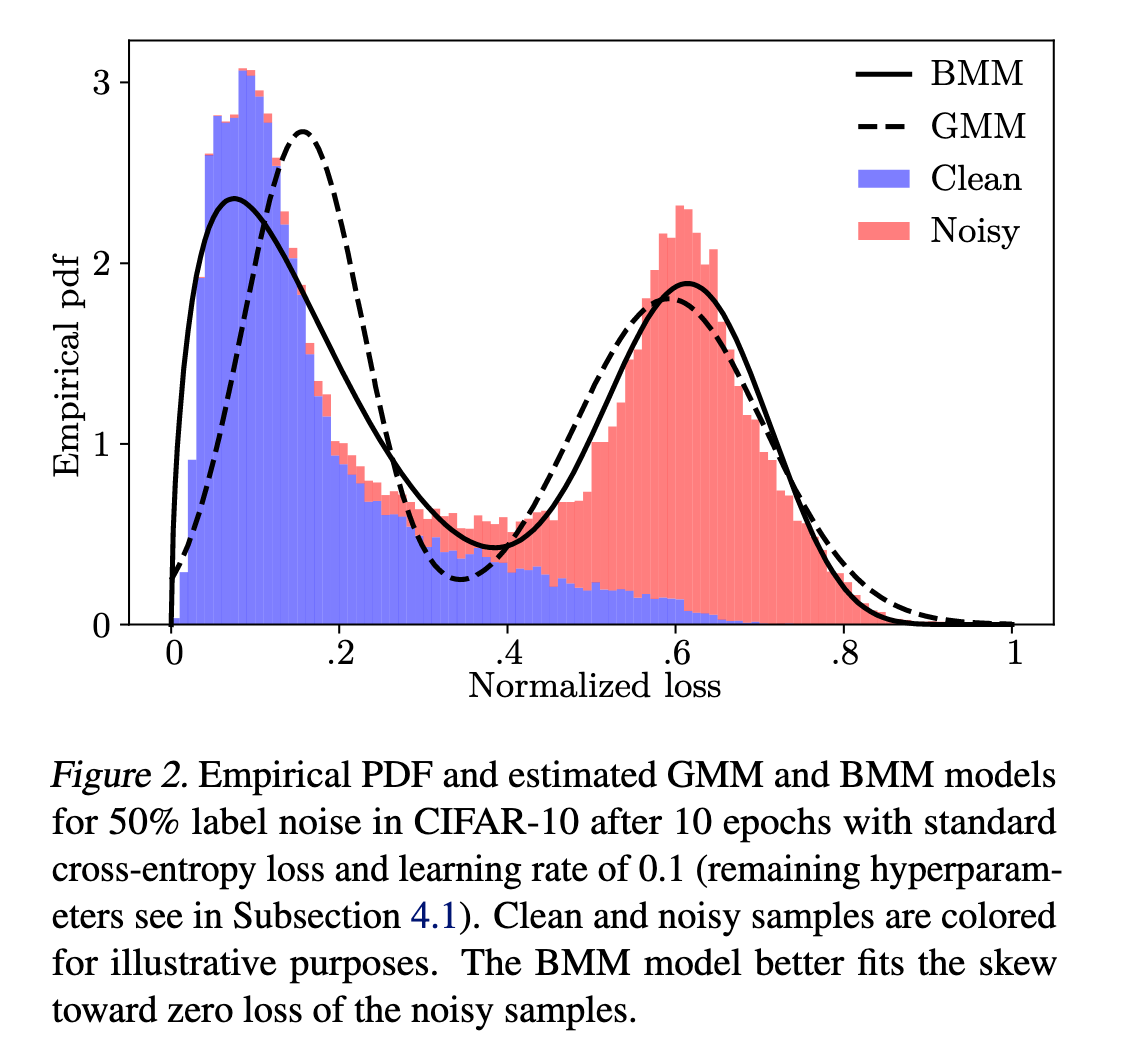
混合模型的选择:
一般混合模型定义为:
其中
直观做法是使用 高斯混合模型(GMM) 来区分干净与噪声(
但高斯分布不能很好刻画干净样本的分布,因为其损失高度偏向零。
Beta 分布 更灵活,能拟合
实验表明:在 CIFAR-10 上 80% 标签噪声条件下,BMM 相比 GMM 在 ROC-AUC 提升约 5 个点(见附录A)。
Beta 分布定义:
将其代入公式(2),即可得到 BMM 的概率密度函数。
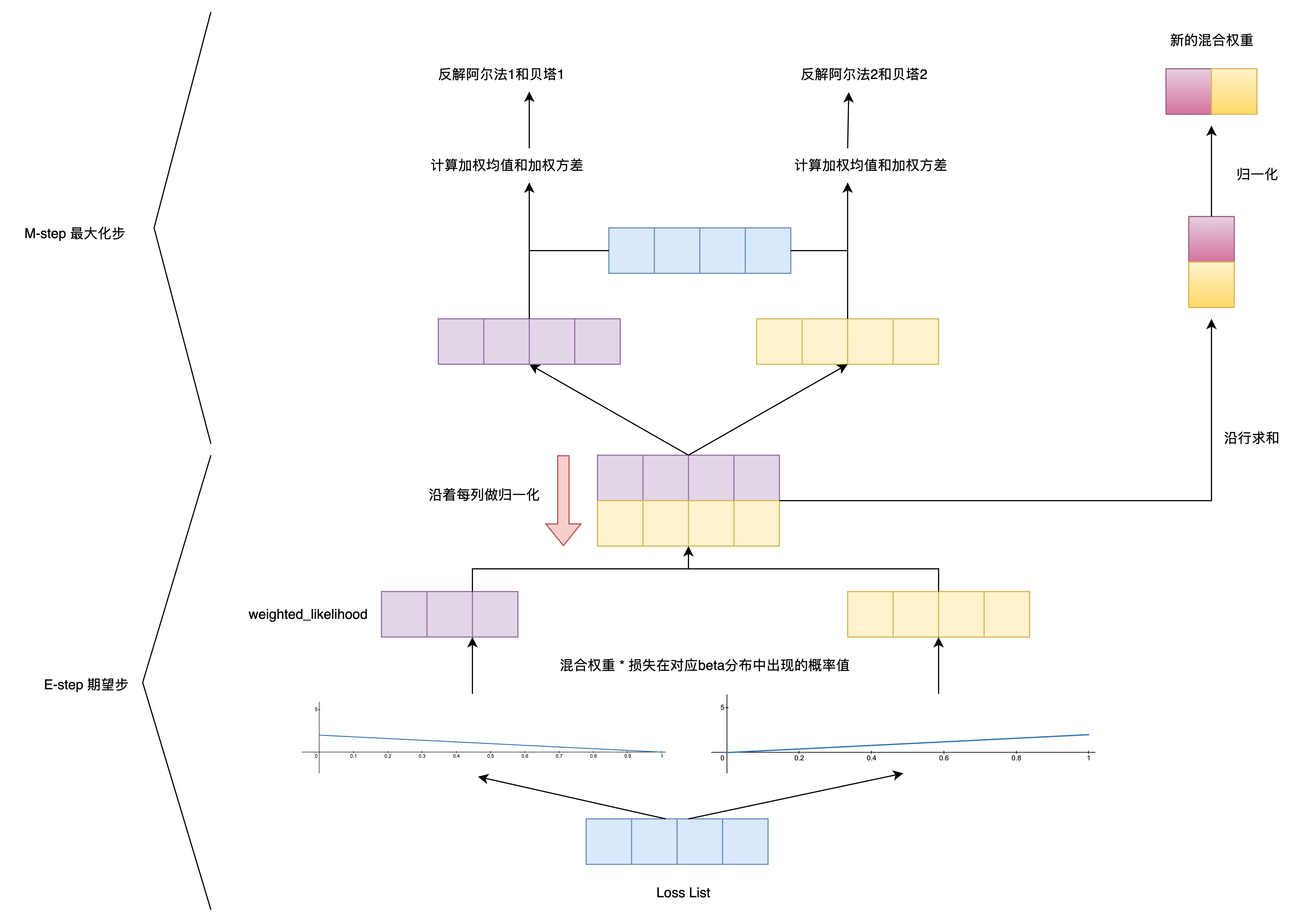
参数估计:EM 算法流程
E 步(公式(4)):固定参数,计算后验概率
M 步(公式(5)(6)(7)):根据加权矩方法更新
更新混合系数(公式(8)):
交替进行 E/M 步,直至收敛或迭代 10 次(本文实验设置)。
数值稳定性处理:为避免
最终判别结果(公式(9)):
得到样本为干净或噪声的概率:
用于估计分布的损失始终是 标准交叉熵损失,在每个 epoch 后对所有样本重新计算。这与训练损失可能不同,因为训练时会引入噪声修正项。
2. 用于标签修正的噪声模型总结
在存在标签噪声的情况下,选择合适的损失函数对学习过程非常关键。标准的分类交叉熵损失(见公式 (1))并不适合,因为它会让模型去拟合噪声标签(Zhang 等,2017)。
Reed 等(2015)提出了 静态硬自举损失(static hard bootstrapping)。这种方法在标准交叉熵中加入了一个感知项,用来修正训练目标。其定义为:
其中,
他们还提出了 静态软自举损失(static soft bootstrapping),将预测的 softmax 概率
然而,固定权重的方式存在两个问题(如第 4.2 小节表 1 所示):
它不能阻止模型去拟合噪声样本。
当
为了解决这些问题,本文提出了 动态硬自举 和 动态软自举 方法。它们的关键是使用噪声模型对每个样本单独加权,即动态地设定
这样一来:
对于干净样本,
对于噪声样本,
是 标签,而 是 输出的概率分布。
在训练后期,CNN 模型能够更好地估计噪声样本的真实类别,因此这种方法更有效。第 4.2 小节的实验表明:动态自举在效果上明显优于静态自举。
3. 联合标签修正与 mixup 数据增强
mixup 数据增强方法(Zhang 等,2018)通过对样本对
其中
为了进一步提高鲁棒性,本文提出将 mixup 与动态自举(dynamic bootstrapping)结合,实现针对每个样本的损失修正:
权重
- 为了获取
该方法利用 mixup 的优势,同时通过动态自举对标签进行修正。在训练过程中,随着预测逐步改进,
如果大多数样本的损失都被网络预测主导,模型会发现一个“捷径”——总是预测同一个类别可以让损失最小。
为解决高噪声问题,本文引入 Tanaka 等(2018)提出的正则项,防止模型将所有样本分配到同一类别:
最终将正则项加权系数
KL散度约束: 惩罚模型把所有样本预测成同一类别的行为; 鼓励模型输出 各类别概率尽量接近均匀分布; 在高噪声情况下,避免动态自举引导模型陷入“单一类别捷径”。
实验
1. 静态与动态自举
动态自举(DY)总体优于静态自举(ST),尤其在高噪声下表现更明显(80%标签噪声下,DY-H 64.2% vs ST-H 25.7%)。
硬自举(Hard)效果优于软自举(Soft),符合 Reed 等(2015)的结论。
使用每样本权重(动态自举)有助于充分修正噪声标签,提高模型在噪声数据下的训练效果。
2. 联合 mixup 与动态自举
动态硬自举比静态方法更优,但单独 mixup 数据增强在高噪声下仍表现优秀。
将动态自举的每样本加权与 mixup 结合(M-DYR-H 和 M-DYRS),在高噪声下显著提升准确率(表2)。
结合方法在 80% 标签噪声下超过单独 mixup 的性能,说明融合策略兼顾了噪声修正与正则化能力。
3. 极端噪声(90%标签噪声)
M-DYR-H 在 CIFAR-10 90%标签噪声下无法收敛。
采用动态 mixup(不同 δ 指导混合比例)和递减 softmax 温度策略(MD-DYR-H / MD-DYR-SH)可稳定训练并提升性能。
MD-DYR-SH 在 CIFAR-10 90%噪声下达 69.1%,CIFAR-100 24.3%,远超现有方法(Tanaka 等 2018 最佳 58.3%)。
4. 与现有方法对比
在 80%-90%标签噪声下,本文方法显著优于 Reed(2015)、Patrini(2017)及 mixup(Zhang 等 2018);
在随机标签不保留真实标签的情况下(Jiang 等, 2018b),MD-DYR-SH 依然优于现有方法,M-DYR-H 在低噪声下略逊于 Jiang 等,但整体表现仍优秀;
高噪声下现有方法难以有效利用噪声样本,容易过拟合噪声标签。
5. 泛化性
在 TinyImageNet 上,MDYR-H 和 MD-DYR-SH 超过 mixup,在不同噪声水平下表现稳定;
在真实世界标签噪声数据 Clothing1M 上,使用 ResNet-50 预训练网络测试准确率 71%,略低于最先进方法 72.23%,说明方法在实际噪声场景下仍有优势,但受预训练和微调策略影响。
总体结论:
动态自举 + mixup 的组合策略(M-DYR-H / MD-DYR-SH)在高噪声数据上效果最优;
硬自举适用于中低噪声,但在极高噪声下需结合温度衰减和动态 mixup 才能稳定训练;
方法在 CIFAR、TinyImageNet 和 Clothing1M 上均显示良好的泛化能力。
结论
本文提出了一种在标签噪声下训练 CNN 的新方法,该方法不依赖任何干净数据集。我们通过对每个样本的交叉熵损失拟合 Beta 混合模型,以无监督方式建模标签噪声。基于该模型,我们实现了一种动态自举损失,该损失根据混合模型的结果,在网络预测值或真实标签(可能含噪声)之间选择使用。
此外,我们将动态自举与 mixup 数据增强相结合,实现了一种极其鲁棒的损失修正方法。在 CIFAR-10 和 CIFAR-100 上进行了大量实验,验证了方法的优缺点,并展示了卓越的性能。我们进一步提出利用 Beta 混合模型指导 mixup 数据增强的组合,以确保在极端噪声水平下训练的可靠收敛。
该方法在 TinyImageNet 上表现出良好的泛化能力,但在 Clothing1M 的非均匀噪声情况下存在一些局限性,这将在未来研究中进一步探索。
代码实现
期望最大化(Expectation-Maximization, EM)算法
EM 是一种处理“隐藏变量”或不完全数据”的参数估计方法。
问题:你有观测数据
目标:估计模型参数
难点:直接最大化似然函数很困难,因为隐藏变量未知
EM 的核心思想:
交替做两件事:
E-step:根据当前参数估计隐藏变量的分布(“猜测每个样本属于哪个分量”)
M-step:在隐藏变量已知的假设下,更新参数,使似然最大(用“责任”加权更新参数)
EM 算法就是解决“已知数据分布形式,但部分信息(隐藏变量)未知”的参数估计问题。它通过 交替猜测隐藏变量 → 根据猜测更新参数 的方式逼近最大似然估计。
论文中所提供的 EM 算法整体流程框架如下:
def fit(self, x):
# 拷贝输入数据,避免修改原始数组 (输入的是每个样本的损失值)
x = np.copy(x)
# ----------------------------
# 对数据做数值修正,保证 Beta 分布计算稳定
# Beta 分布定义在开区间 (0, 1),x=0 或 x=1 会导致 pdf 或矩估计出现数值不稳定
# eps 用来把 0/1 附近的值略微拉开
# ----------------------------
eps = 1e-4
x[x >= 1 - eps] = 1 - eps # 将大于等于 1-eps 的值置为 1-eps
x[x <= eps] = eps # 将小于等于 eps 的值置为 eps
# ----------------------------
# 开始 EM 迭代
# ----------------------------
for i in range(self.max_iters):
# ------------------------
# E-step(期望步)
# 计算每个样本属于每个 Beta 分量的责任
# r.shape = (2, N),r[k, i] 表示第 i 个样本属于分量 k 的概率
# ------------------------
r = self.responsibilities(x)
# ------------------------
# M-step(最大化步)
# 使用责任 r 对每个分量的 Beta 分布参数进行加权拟合
# fit_beta_weighted 使用加权矩估计得到 alpha 和 beta
# ------------------------
self.alphas[0], self.betas[0] = fit_beta_weighted(x, r[0]) # 更新第 0 个分量
self.alphas[1], self.betas[1] = fit_beta_weighted(x, r[1]) # 更新第 1 个分量
# ------------------------
# 更新混合权重 pi_k
# 根据责任求每个分量的总权重,然后归一化
# ------------------------
self.weight = r.sum(axis=1) # 每个分量的总责任
self.weight /= self.weight.sum() # 归一化,使 sum(weight)=1
# 返回训练好的模型实例
return self1. E-step(期望步): 作者使用两个混合 Beta 分布分别建模干净样本和噪声样本的损失分布。在 E 步中,首先根据当前模型参数,计算每个样本属于 Beta1(干净样本损失分布)和 Beta2(噪声样本损失分布)的后验概率(responsibility),即每个样本属于各分量的概率,这两个概率经过归一化保证和为 1。
def likelihood(self, x, y):
"""
计算样本 x 在第 y 个 Beta 分量下的似然(概率密度函数值)
参数:
x : array-like
样本数据,可以是单个值或向量
y : int
分量索引,0 表示 Beta1,1 表示 Beta2
返回:
array-like
样本 x 在 Beta 分布 y 下的概率密度
"""
return stats.beta.pdf(x, self.alphas[y], self.betas[y])
def weighted_likelihood(self, x, y):
"""
计算样本 x 在第 y 个 Beta 分量下的加权似然
参数:
x : array-like
样本数据
y : int
分量索引
返回:
array-like
样本 x 在 Beta 分量 y 下的加权概率密度,即 pdf * 分量权重
"""
# self.weight[y] 是当前 Beta 分量的混合权重 π_y
return self.weight[y] * self.likelihood(x, y)
def responsibilities(self, x):
"""
E-step 的核心:计算每个样本属于各个 Beta 分量的后验概率(responsibility)
参数:
x : array-like
样本数据
返回:
r : ndarray, shape=(2, N)
r[k, i] 表示样本 i 属于分量 k 的概率
"""
# 先计算每个样本在各个分量下的加权似然
# r.shape = (2, N),每行对应一个分量,每列对应一个样本
r = np.array([self.weighted_likelihood(x, i) for i in range(2)])
# 防止数值过小导致除零或 NaN
# 将小于 eps_nan 的概率置为 eps_nan
r[r <= self.eps_nan] = self.eps_nan
# 对每个样本归一化,使两行(两个分量)概率和为 1
# 对应公式: r_{ik} = π_k * pdf(x_i | θ_k) / sum_j(π_j * pdf(x_i | θ_j))
r /= r.sum(axis=0)
return r2. M-step(最大化步): 利用 E 步得到的责任(作为权重),对每个分量重新估计参数。
def weighted_mean(x, w):
"""
计算加权平均值
参数:
x : array-like
样本数据
w : array-like
权重向量,对应每个样本的权重(例如 EM 算法中的责任 r)
返回:
float
加权平均值
"""
# 加权平均值公式:sum(w_i * x_i) / sum(w_i)
return np.sum(w * x) / np.sum(w)
def fit_beta_weighted(x, w):
"""
根据加权样本估计 Beta 分布的参数 alpha 和 beta
参数:
x : array-like
样本数据,取值范围应在 (0, 1)
w : array-like
权重向量,用于加权估计(例如来自 E-step 的责任)
返回:
(alpha, beta) : tuple of floats
拟合得到的 Beta 分布参数
"""
# Step 1: 计算加权均值
x_bar = weighted_mean(x, w)
# Step 2: 计算加权方差
s2 = weighted_mean((x - x_bar)**2, w)
# Step 3: 根据矩估计公式推导 alpha
# Beta 分布的均值 mu = alpha / (alpha + beta)
# 方差 sigma^2 = alpha*beta / ((alpha+beta)^2 * (alpha+beta+1))
# 通过加权均值和方差反解得到 alpha
alpha = x_bar * ((x_bar * (1 - x_bar)) / s2 - 1)
# Step 4: 根据均值公式反解 beta
beta = alpha * (1 - x_bar) / x_bar
# 返回估计的参数
return alpha, beta加权平均值公式: 在计算平均时考虑“重要性”,权重越大,样本对结果的影响越大; 对比普通求平均值,所有样本的权重都是
。
加权方差公式: 加权方差考虑了样本的“重要性”,权重越大的样本,其“离均值的偏差”对整体方差的贡献更大。
完整的EM算法执行过程如下图所示:
标签噪声建模
def track_training_loss(args, model, device, train_loader, epoch, bmm_model1, bmm_model_maxLoss1, bmm_model_minLoss1):
'''
跟踪训练集上的每个样本损失,并拟合 Beta 混合模型(BMM)用于噪声样本检测。
输入:
- args: 一些训练参数(未在函数内部使用)
- model: 当前训练的神经网络模型
- device: 'cuda' 或 'cpu'
- train_loader: 训练数据加载器
- epoch: 当前训练轮数
- bmm_model1, bmm_model_maxLoss1, bmm_model_minLoss1: 之前轮次的 BMM 模型及最大/最小损失
输出:
- all_losses: 每个样本的 NLL 损失
- all_probs: 每个样本的 log_softmax 概率
- all_argmaxXentropy: 基于预测类别的交叉熵损失
- bmm_model: 拟合当前 epoch 的 Beta 混合模型
- bmm_model_maxLoss: 当前 epoch 的最大损失值(用于归一化)
- bmm_model_minLoss: 当前 epoch 的最小损失值(用于归一化)
'''
# 设置模型为评估模式,不计算梯度
model.eval()
# 用于存储全量样本信息
all_losses = torch.Tensor()
all_predictions = torch.Tensor()
all_probs = torch.Tensor()
all_argmaxXentropy = torch.Tensor()
# 遍历训练集 batch
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(device), target.to(device)
prediction = model(data) # 前向预测
# 1. 对预测值做 log_softmax
prediction = F.log_softmax(prediction, dim=1)
# 2. 计算每个样本的负对数似然损失(NLL)
idx_loss = F.nll_loss(prediction, target, reduction='none')
idx_loss.detach_() # 不计算梯度
all_losses = torch.cat((all_losses, idx_loss.cpu())) # 收集到全量损失
# 3. 保存概率信息
probs = prediction.clone()
probs.detach_()
all_probs = torch.cat((all_probs, probs.cpu()))
# 4. 基于预测类别的交叉熵
arg_entr = torch.max(prediction, dim=1)[1] # 取预测最大值类别索引
arg_entr = F.nll_loss(prediction.float(), arg_entr.to(device), reduction='none')
arg_entr.detach_()
all_argmaxXentropy = torch.cat((all_argmaxXentropy, arg_entr.cpu()))
# 将全量损失转换为 numpy 数组
loss_tr = all_losses.data.numpy()
# -------------------------------
# 异常值检测(去除极端高低损失)
# -------------------------------
max_perc = np.percentile(loss_tr, 95) # 上 95% 分位数
min_perc = np.percentile(loss_tr, 5) # 下 5% 分位数
loss_tr = loss_tr[(loss_tr <= max_perc) & (loss_tr >= min_perc)] # 去掉极端值
# 将最大最小值保存为 Tensor,用于后续归一化
bmm_model_maxLoss = torch.FloatTensor([max_perc]).to(device)
bmm_model_minLoss = torch.FloatTensor([min_perc]).to(device) + 1e-5 # 避免除零
# -------------------------------
# 损失归一化到 (0,1) 区间
# -------------------------------
loss_tr = (loss_tr - bmm_model_minLoss.data.cpu().numpy()) / \
(bmm_model_maxLoss.data.cpu().numpy() - bmm_model_minLoss.data.cpu().numpy() + 1e-6)
# 防止越界
loss_tr[loss_tr >= 1] = 1 - 1e-4
loss_tr[loss_tr <= 0] = 1e-4
# -------------------------------
# 拟合 Beta 混合模型 (BMM)
# -------------------------------
bmm_model = BetaMixture1D(max_iters=10)
bmm_model.fit(loss_tr) # 使用归一化后的损失拟合
bmm_model.create_lookup(1) # 创建查找表,用于快速估计样本属于噪声的后验概率 --- 对同一个样本来说,其属于干净样本分布的概率和属于噪声样本分布的概率之和为1
# 返回全量损失、概率、基于预测类别的损失,以及拟合的 BMM 和最大最小损失
return all_losses.data.numpy(), \
all_probs.data.numpy(), \
all_argmaxXentropy.numpy(), \
bmm_model, bmm_model_maxLoss, bmm_model_minLossdef probability(self, x):
'''
计算给定样本 x 的混合概率密度
输入:
- x: 样本,可以是单个值或数组
输出:
- 样本在混合 Beta 分布下的总概率密度
'''
# 对每个 Beta 分布分量,计算加权似然,然后求和
return sum(self.weighted_likelihood(x, y) for y in range(2))
def posterior(self, x, y):
'''
计算样本 x 属于第 y 个 Beta 分布分量的后验概率 P(y|x)
输入:
- x: 样本
- y: 分量索引(0 或 1)
输出:
- 后验概率 P(y|x)
'''
# 后验概率 = 加权似然 / 总概率
return self.weighted_likelihood(x, y) / (self.probability(x) + self.eps_nan)
def create_lookup(self, y):
'''
为指定分量 y 创建后验概率查找表,用于快速估算样本属于该分量的概率
输入:
- y: 分量索引(0 或 1)
'''
# 在 [0,1] 范围内生成均匀的点 -- 损失会被归一化到[0,1]区间中去,lookup_resolution默认为100
x_l = np.linspace(0+self.eps_nan, 1-self.eps_nan, self.lookup_resolution)
# 计算每个点属于 y 分量的后验概率
lookup_t = self.posterior(x_l, y)
# 将最大概率点之后的值全部置为最大值,保证查找表单调
lookup_t[np.argmax(lookup_t):] = lookup_t.max()
# 保存查找表
self.lookup = lookup_t
# 保存对应的 x 值(虽然最终没使用)
self.lookup_loss = x_l
def look_lookup(self, x, loss_max, loss_min):
'''
使用查找表快速估算样本的后验概率
输入:
- x: 样本张量
- loss_max: 最大损失(用于归一化)
- loss_min: 最小损失(用于归一化)
输出:
- 样本对应的查找表后验概率
'''
# 转为 numpy 数组
x_i = x.clone().cpu().numpy()
# 映射到查找表索引
x_i = np.array((self.lookup_resolution * x_i).astype(int))
# 边界处理
x_i[x_i < 0] = 0
x_i[x_i == self.lookup_resolution] = self.lookup_resolution - 1
# 返回查找表对应的概率
return self.lookup[x_i]静态 MixUp 数据增强
- 对输入数据进行 MixUp 增强
def mixup_data(x, y, alpha=1.0, device='cuda'):
'''
对输入的 batch 数据进行 Mixup 数据增强
输入:
- x: 输入特征张量,形状 [batch_size, ...]
- y: 对应标签张量,形状 [batch_size, num_classes] 或 [batch_size]
- alpha: Beta 分布参数,用于生成混合系数 lambda
- device: 数据所在设备,'cuda' 或 'cpu'
输出:
- mixed_x: 混合后的输入特征张量
- y_a: 原始标签
- y_b: 对应被混合的另一组标签
- lam: 混合系数 lambda
'''
# 1. 根据 alpha 参数生成混合系数 lam
if alpha > 0:
lam = np.random.beta(alpha, alpha) # 从 Beta(alpha, alpha) 分布采样
else:
lam = 1 # alpha=0 时,不做混合,相当于直接返回原样本
# 2. 获取 batch 大小
batch_size = x.size()[0]
# 3. 随机打乱 batch 索引,用于选择混合的另一组样本
if device == 'cuda':
index = torch.randperm(batch_size).cuda()
else:
index = torch.randperm(batch_size)
# 4. 根据 lambda 对输入特征进行线性混合
mixed_x = lam * x + (1 - lam) * x[index, :]
# 5. 对应的标签也要保留两组,用于计算 Mixup 损失
y_a, y_b = y, y[index]
# 6. 返回混合后的输入、两组标签以及混合系数
return mixed_x, y_a, y_b, lam- 对输出 Loss 进行MixUp 增强
def mixup_criterion(pred, y_a, y_b, lam):
return lam * F.nll_loss(pred, y_a) + (1 - lam) * F.nll_loss(pred, y_b)动态硬自举 + 静态MixUp增强
def mixup_data_Boot(x, y, alpha=1.0, device='cuda'):
'''Returns mixed inputs, pairs of targets, and lambda'''
if alpha > 0:
lam = np.random.beta(alpha, alpha)
else:
lam = 1
batch_size = x.size()[0]
if device=='cuda':
index = torch.randperm(batch_size).to(device)
else:
index = torch.randperm(batch_size)
mixed_x = lam * x + (1 - lam) * x[index, :]
y_a, y_b = y, y[index]
# 此代码上面已经给出过注释,不过用于自举的时候需要多返回index
return mixed_x, y_a, y_b, lam, indexdef train_mixUp_HardBootBeta(args, model, device, train_loader, optimizer, epoch, alpha, bmm_model,
bmm_model_maxLoss, bmm_model_minLoss, reg_term, num_classes):
"""
基于 Mixup + Hard Bootstrapping + Beta 混合模型动态权重的训练函数
参数:
- args: 配置参数,包括 batch_size、log_interval 等
- model: 待训练的神经网络模型
- device: 训练设备 (cuda / cpu)
- train_loader: 训练数据加载器
- optimizer: 优化器
- epoch: 当前训练轮次
- alpha: Mixup Beta 分布参数
- bmm_model: Beta 混合模型对象,用于计算噪声权重
- bmm_model_maxLoss: 训练集最大损失,用于归一化
- bmm_model_minLoss: 训练集最小损失,用于归一化
- reg_term: 正则化系数
- num_classes: 类别数量
"""
model.train() # 设置模型为训练模式
loss_per_batch = [] # 用于保存每个 batch 的损失
acc_train_per_batch = [] # 用于保存每个 batch 的训练精度
correct = 0 # 用于累计正确预测样本数
# 遍历训练集每个 batch
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(device), target.to(device)
optimizer.zero_grad() # 清空梯度
# 1. 对当前 batch 做一次前向传播,获取原始输出
output_x1 = model(data)
output_x1.detach_() # 不计算梯度
optimizer.zero_grad()
# 2. Mixup 数据增强,返回混合输入、两组标签、Mixup 系数 lam、索引
inputs_mixed, targets_1, targets_2, lam, index = mixup_data_Boot(data, target, alpha, device)
# 对混合样本进行前向传播
output = model(inputs_mixed)
output_mean = F.softmax(output, dim=1) # 转为概率
tab_mean_class = torch.mean(output_mean, -2) # 计算每个类别在 batch 中的平均概率
output = F.log_softmax(output, dim=1) # 转为 log 概率,用于 NLL loss
# 3. 使用 Beta 混合模型计算每个样本属于噪声分布的概率 B
B = compute_probabilities_batch(data, target, model, bmm_model, bmm_model_maxLoss, bmm_model_minLoss)
B = B.to(device)
B[B <= 1e-4] = 1e-4 # 避免 B 太小
B[B >= 1 - 1e-4] = 1 - 1e-4 # 避免 B 太大
# 4. 准备 Hard Bootstrapping 相关变量
output_x1 = F.log_softmax(output_x1, dim=1)
output_x2 = output_x1[index, :] # 对应 Mixup 中第二组样本
B2 = B[index] # 第二组样本的权重
z1 = torch.max(output_x1, dim=1)[1] # 第一组样本预测类别索引
z2 = torch.max(output_x2, dim=1)[1] # 第二组样本预测类别索引
# 5. 计算每个样本的 Hard Bootstrapping 损失
# 第一组真实标签损失
loss_x1_vec = (1 - B) * F.nll_loss(output, targets_1, reduction='none')
loss_x1 = torch.sum(loss_x1_vec) / len(loss_x1_vec)
# 第一组预测类别损失(噪声主导)
loss_x1_pred_vec = B * F.nll_loss(output, z1, reduction='none')
loss_x1_pred = torch.sum(loss_x1_pred_vec) / len(loss_x1_pred_vec)
# 第二组真实标签损失
loss_x2_vec = (1 - B2) * F.nll_loss(output, targets_2, reduction='none')
loss_x2 = torch.sum(loss_x2_vec) / len(loss_x2_vec)
# 第二组预测类别损失(噪声主导)
loss_x2_pred_vec = B2 * F.nll_loss(output, z2, reduction='none')
loss_x2_pred = torch.sum(loss_x2_pred_vec) / len(loss_x2_pred_vec)
# 6. 根据 Mixup 系数 lam 加权组合两组损失
loss = lam*(loss_x1 + loss_x1_pred) + (1-lam)*(loss_x2 + loss_x2_pred)
# 7. 类别概率均匀性正则化
loss_reg = reg_loss_class(tab_mean_class, num_classes)
loss = loss + reg_term * loss_reg
# 8. 反向传播与参数更新
loss.backward()
optimizer.step()
# 9. 监控每个 batch 的损失
loss_per_batch.append(loss.item())
# 10. 保存训练精度
pred = output.max(1, keepdim=True)[1] # 预测类别索引
correct += pred.eq(target.view_as(pred)).sum().item()
acc_train_per_batch.append(100. * correct / ((batch_idx+1)*args.batch_size))
# 11. 打印训练日志
if batch_idx % args.log_interval == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}, Accuracy: {:.0f}%, Learning rate: {:.6f}'.format(
epoch, batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item(),
100. * correct / ((batch_idx + 1) * args.batch_size),
optimizer.param_groups[0]['lr']))
# 12. 计算 epoch 平均损失和精度
loss_per_epoch = [np.average(loss_per_batch)]
acc_train_per_epoch = [np.average(acc_train_per_batch)]
return (loss_per_epoch, acc_train_per_epoch)def compute_probabilities_batch(data, target, cnn_model, bmm_model, bmm_model_maxLoss, bmm_model_minLoss):
cnn_model.eval()
outputs = cnn_model(data)
outputs = F.log_softmax(outputs, dim=1)
batch_losses = F.nll_loss(outputs.float(), target, reduction = 'none')
batch_losses.detach_()
outputs.detach_()
cnn_model.train()
# 损失归一化,异常值边界化
batch_losses = (batch_losses - bmm_model_minLoss) / (bmm_model_maxLoss - bmm_model_minLoss + 1e-6)
batch_losses[batch_losses >= 1] = 1-10e-4
batch_losses[batch_losses <= 0] = 10e-4
#B = bmm_model.posterior(batch_losses,1)
# 查表快速得到每个样本损失属于beta2分布的概率(估算)
B = bmm_model.look_lookup(batch_losses, bmm_model_maxLoss, bmm_model_minLoss)
return torch.FloatTensor(B)# KL 散度
def reg_loss_class(mean_tab,num_classes=10):
loss = 0
for items in mean_tab:
loss += (1./num_classes)*torch.log((1./num_classes)/items)
return loss动态软自举 + 静态MixUp增强
def train_mixUp_SoftBootBeta(args, model, device, train_loader, optimizer, epoch, alpha, bmm_model, bmm_model_maxLoss, \
bmm_model_minLoss, reg_term, num_classes):
"""
训练函数:MixUp + Soft Bootstrapping + Beta Mixture Model
- 使用 MixUp 数据增强
- 使用 Soft Bootstrapping(结合模型预测分布与真实标签)
- 使用 BMM 模型估计样本是否为干净样本的概率 B
- 使用类别分布正则化防止过拟合
"""
model.train() # 设置为训练模式
loss_per_batch = [] # 记录每个 batch 的 loss
acc_train_per_batch = [] # 记录每个 batch 的训练集精度
correct = 0 # 累积正确预测的数量
# 遍历所有 batch
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(device), target.to(device)
optimizer.zero_grad() # 梯度清零
# 第一次前向传播:得到原始样本的预测结果
output_x1 = model(data)
output_x1.detach_() # 切断梯度,不参与反向传播
optimizer.zero_grad()
# 估计每个样本的干净概率 B
if epoch == 1:
# 第一个 epoch 没法建模,统一设置为 0.5
B = 0.5*torch.ones(len(target)).float().to(device)
else:
# 通过 Beta Mixture Model 估计每个样本的干净概率
B = compute_probabilities_batch(data, target, model, bmm_model, bmm_model_maxLoss, bmm_model_minLoss)
B = B.to(device)
# 防止数值极端情况,限制在 [1e-4, 1-1e-4] 区间内
B[B <= 1e-4] = 1e-4
B[B >= 1-1e-4] = 1-1e-4
# MixUp 数据增强:混合两个样本(输入和标签)
inputs_mixed, targets_1, targets_2, lam, index = mixup_data_Boot(data, target, alpha, device)
# 前向传播:得到混合样本的预测结果
output = model(inputs_mixed)
output_mean = F.softmax(output, dim=1) # softmax 概率分布
output = F.log_softmax(output, dim=1) # log-softmax 结果(供 NLLLoss 使用)
# 提取被 mixup 的第二个样本对应的预测结果
output_x2 = output_x1[index, :]
# 统计所有类别的平均预测概率,用于正则化
tab_mean_class = torch.mean(output_mean, -2) # 按样本维度取均值
# 计算 Soft Bootstrapping 的混合损失
# - targets_1, targets_2: mixup 后的原始标签
# - output_x1, output_x2: 模型 soft label 预测结果
# - B: 每个样本为干净的概率
# - lam: mixup 权重
loss = mixup_criterion_mixSoft(output, targets_1, targets_2, B, lam, index, output_x1, output_x2)
# 加上类别分布正则项,避免预测过度偏向某些类别
loss_reg = reg_loss_class(tab_mean_class)
loss = loss + reg_term*loss_reg
# 反向传播 + 参数更新
loss.backward()
optimizer.step()
################## monitor losses ####################################
loss_per_batch.append(loss.item()) # 保存 batch 的损失
########################################################################
# 计算 batch 的训练精度
pred = output.max(1, keepdim=True)[1] # 预测类别 = 最大 log 概率对应的类别
correct += pred.eq(target.view_as(pred)).sum().item() # 累积正确数量
acc_train_per_batch.append(100. * correct / ((batch_idx+1)*args.batch_size))
# 定期打印日志
if batch_idx % args.log_interval == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}, Accuracy: {:.0f}%, Learning rate: {:.6f}'.format(
epoch, batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item(),
100. * correct / ((batch_idx + 1) * args.batch_size),
optimizer.param_groups[0]['lr']))
# 统计一个 epoch 的平均 loss 和 acc
loss_per_epoch = [np.average(loss_per_batch)]
acc_train_per_epoch = [np.average(acc_train_per_batch)]
return (loss_per_epoch, acc_train_per_epoch)def mixup_criterion_mixSoft(pred, y_a, y_b, B, lam, index, output_x1, output_x2):
"""
计算 MixUp + Soft Bootstrapping 的损失函数
Args:
pred : log-softmax 输出 (batch_size, num_classes)
y_a, y_b : mixup 的两个标签
B : 每个样本为“干净样本”的概率 (batch_size,)
lam : mixup 系数 (Beta 分布采样得到的混合比例)
index : 打乱顺序的索引,用于取出第二组样本
output_x1 : 原始 batch 的模型输出 (未打乱)
output_x2 : 打乱后的模型输出 (对应 y_b 的样本)
Returns:
标量 loss (一个 batch 的平均损失)
"""
return torch.sum(
# ----------- 第一部分:lam 权重对应的混合样本 -----------
(lam) * (
# (1 - B):更多信任真实标签 → 使用 NLLLoss
(1 - B) * F.nll_loss(pred, y_a, reduction='none') +
# B:更多信任模型预测(Soft Bootstrapping)
# -torch.sum(p_soft * log_pred),即交叉熵形式
B * (-torch.sum(F.softmax(output_x1, dim=1) * pred, dim=1))
)
+
# ----------- 第二部分:(1-lam) 权重对应的另一半混合样本 -----------
(1 - lam) * (
# (1 - B[index]):信任真实标签 y_b
(1 - B[index]) * F.nll_loss(pred, y_b, reduction='none') +
# B[index]:信任打乱后的样本 soft label
B[index] * (-torch.sum(F.softmax(output_x2, dim=1) * pred, dim=1))
)
) / len(pred) # 对 batch 求平均soft label 是直接每个类别乘上其对应的软概率值,再把所有类别的概率值求和,得到当前样本的软损失。
动态MixUp增强
def train_mixUp_Beta(args, model, device, train_loader, optimizer, epoch, alpha, bmm_model,
bmm_model_maxLoss, bmm_model_minLoss):
# 设置模型为训练模式
model.train()
loss_per_batch = [] # 用于记录每个 batch 的 loss
acc_train_per_batch = [] # 用于记录每个 batch 的训练精度
correct = 0 # 统计累计预测正确的样本数
# 遍历每个 batch
for batch_idx, (data, target) in enumerate(train_loader):
# 将数据和标签放到 GPU/CPU
data, target = data.to(device), target.to(device)
optimizer.zero_grad() # 梯度清零
# 第一个 epoch 用固定 B=0.5,表示一开始不区分干净样本和噪声样本
if epoch == 1:
B = 0.5 * torch.ones(len(target)).float().to(device)
else:
# 从 Beta 混合模型中计算每个样本属于“干净样本”的概率 B
B = compute_probabilities_batch(data, target, model, bmm_model, bmm_model_maxLoss, bmm_model_minLoss)
B = B.to(device)
# 限制 B 的取值范围,避免数值不稳定(太接近 0 或 1)
B[B <= 1e-4] = 1e-4
B[B >= 1 - 1e-4] = 1 - 1e-4
# 使用 B 控制 mixup 的动态权重,生成混合样本和混合标签
inputs_mixed, targets_1, targets_2, index = mixup_data_beta(data, target, B, device)
# 前向传播
output = model(inputs_mixed)
output = F.log_softmax(output, dim=1) # 输出转 log-softmax,用于 NLLLoss
# 计算 MixUp 的损失(Beta 动态控制的 mixup loss)
loss = mixup_criterion_beta(output, targets_1, targets_2)
# 反向传播
loss.backward()
# 更新参数
optimizer.step()
################## monitor losses ####################################
loss_per_batch.append(loss.item()) # 保存该 batch 的 loss
########################################################################
# 保存训练精度:取 log-probability 最大的类别作为预测
pred = output.max(1, keepdim=True)[1] # 预测类别
correct += pred.eq(target.view_as(pred)).sum().item() # 累积正确个数
acc_train_per_batch.append(100. * correct / ((batch_idx + 1) * args.batch_size)) # 当前平均精度
# 打印训练状态(每 log_interval 个 batch 打印一次)
if batch_idx % args.log_interval == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}, Accuracy: {:.0f}%, Learning rate: {:.6f}'.format(
epoch, batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item(),
100. * correct / ((batch_idx + 1) * args.batch_size),
optimizer.param_groups[0]['lr']))
# 计算每个 epoch 的平均 loss 和 accuracy
loss_per_epoch = [np.average(loss_per_batch)]
acc_train_per_epoch = [np.average(acc_train_per_batch)]
return (loss_per_epoch, acc_train_per_epoch)def mixup_data_beta(x, y, B, device='cuda'):
'''
基于 Beta 混合模型 (BMM) 概率 B 来生成 MixUp 的样本。
输入:
x: 输入图像 batch,形状 [batch_size, C, H, W]
y: 输入标签 batch,形状 [batch_size]
B: 每个样本的 Beta 概率(表示该样本干净的概率),形状 [batch_size]
device: 使用的设备(默认 'cuda')
输出:
mixed_x: MixUp 后的输入图像
y_a, y_b: MixUp 对应的两个标签
index: 被打乱的索引(用于混合的另一半样本)
'''
batch_size = x.size()[0] # 当前 batch 的大小
# 随机打乱索引,用于 MixUp 配对
if device == 'cuda':
index = torch.randperm(batch_size).cuda()
else:
index = torch.randperm(batch_size)
# 计算归一化因子 lam
# lam = (1 - B_i) + (1 - B_j),保证加权后的比例能正确归一化
lam = ((1 - B) + (1 - B[index]))
# 动态 MixUp:
# 1-B : 表示样本是 "干净" 的概率
# 按照样本的干净概率加权混合两个图像,干净样本贡献大,噪声样本贡献小
# 权重 = (1-B) / lam 和 (1-B[index]) / lam
mixed_x = ((1 - B) / lam).unsqueeze(1).unsqueeze(2).unsqueeze(3) * x + \
((1 - B[index]) / lam).unsqueeze(1).unsqueeze(2).unsqueeze(3) * x[index, :]
# 返回标签对:y 和打乱后的 y[index]
y_a, y_b = y, y[index]
return mixed_x, y_a, y_b, index
def mixup_criterion_beta(pred, y_a, y_b):
lam = np.random.beta(32, 32)
return lam * F.nll_loss(pred, y_a) + (1-lam) * F.nll_loss(pred, y_b)动态MixUp增强 + 动态自举 + 温度调节
def train_mixUp_SoftHardBetaDouble(args, model, device, train_loader, optimizer, epoch, bmm_model, \
bmm_model_maxLoss, bmm_model_minLoss, countTemp, k, temp_length, reg_term, num_classes):
"""
训练函数:Dynamic MixUp + Soft/Hard Bootstrapping + Beta混合权重 + 温度调节
"""
model.train() # 设置模型为训练模式
loss_per_batch = [] # 用于记录每个batch的损失
acc_train_per_batch = [] # 用于记录每个batch的训练精度
correct = 0 # 累计正确预测数
steps_every_n = 2 # 每经过2个epoch调整一次温度索引k
temp_vec = np.linspace(1, 0.001, temp_length) # 温度衰减序列
# 遍历训练数据集
for batch_idx, (data, target) in enumerate(train_loader):
# 将数据和标签放到指定设备上
data, target = data.to(device), target.to(device)
optimizer.zero_grad() # 梯度清零
# 对当前batch进行一次前向传播,得到原始预测
output_x1 = model(data)
output_x1.detach_() # 阻止梯度回传到这里
optimizer.zero_grad()
# 计算样本属于噪声分布的概率B
if epoch == 1:
# 第1个epoch默认均匀概率0.5
B = 0.5 * torch.ones(len(target)).float().to(device)
else:
# 后续epoch使用Beta混合模型预测
B = compute_probabilities_batch(data, target, model, bmm_model, bmm_model_maxLoss, bmm_model_minLoss)
B = B.to(device)
# 防止概率为0或1导致数值问题
B[B <= 1e-4] = 1e-4
B[B >= 1-1e-4] = 1-1e-4
# 使用Beta权重进行动态MixUp
inputs_mixed, targets_1, targets_2, index = mixup_data_beta(data, target, B, device)
output = model(inputs_mixed) # 对混合后的样本前向传播
output_mean = F.softmax(output, dim=1) # 得到混合样本的softmax概率
output = F.log_softmax(output, dim=1) # log_softmax用于计算NLLLoss
output_x2 = output_x1[index, :] # 根据混合索引获取对应的原始预测
tab_mean_class = torch.mean(output_mean,-2) # 计算每个类别的平均概率,用于正则化
# 选择当前温度
Temp = temp_vec[k]
# 计算Soft/Hard MixUp损失
loss = mixup_criterion_SoftHard(output, targets_1, targets_2, B, index, output_x1, output_x2, Temp)
# 类别分布正则化
loss_reg = reg_loss_class(tab_mean_class, num_classes)
loss = loss + reg_term*loss_reg
# 反向传播
loss.backward()
optimizer.step()
################## 监控loss ####################################
loss_per_batch.append(loss.item())
#################################################################
# 保存训练精度
pred = output.max(1, keepdim=True)[1] # 取每个样本预测最大概率的类别索引
correct += pred.eq(target.view_as(pred)).sum().item() # 累计正确预测数
acc_train_per_batch.append(100. * correct / ((batch_idx+1)*args.batch_size)) # 当前batch平均精度
# 日志打印
if batch_idx % args.log_interval == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}, Accuracy: {:.0f}%, Learning rate: {:.6f}, Temperature: {:.4f}'.format(
epoch, batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item(),
100. * correct / ((batch_idx + 1) * args.batch_size),
optimizer.param_groups[0]['lr'], Temp))
# 计算当前epoch平均损失和精度
loss_per_epoch = [np.average(loss_per_batch)]
acc_train_per_epoch = [np.average(acc_train_per_batch)]
# 更新温度索引,每steps_every_n个epoch更新一次
countTemp = countTemp + 1
if countTemp == steps_every_n:
k = k + 1
k = min(k, len(temp_vec) - 1) # 防止索引越界
countTemp = 1
return (loss_per_epoch, acc_train_per_epoch, countTemp, k)def mixup_criterion_SoftHard(pred, y_a, y_b, B, index, output_x1, output_x2, Temp):
"""
计算Soft/Hard Bootstrapping + MixUp损失
说明:
- pred: 模型对混合样本的log_softmax输出
- y_a, y_b: 原始样本标签,对应混合前的两个样本
- B: 样本属于噪声分布的概率 (Beta权重)
- index: 混合索引,对应第二个样本
- output_x1, output_x2: 原始样本前向传播得到的log_softmax输出
- Temp: 温度参数,用于控制soft label的平滑程度
"""
# 对每个样本计算Soft/Hard损失
# 对第一个样本:
# (1 - B) * F.nll_loss(pred, y_a) -> 保留ground-truth标签的损失 (Hard部分)
# B * (-torch.sum(F.softmax(output_x1/Temp) * pred)) -> 利用模型预测的soft标签进行损失计算 (Soft部分)
# 对第二个样本同理,使用B[index]和output_x2
loss = torch.sum(
(0.5) * (
(1 - B) * F.nll_loss(pred, y_a, reduction='none') +
B * (-torch.sum(F.softmax(output_x1/Temp, dim=1) * pred, dim=1))
) +
(0.5) * (
(1 - B[index]) * F.nll_loss(pred, y_b, reduction='none') +
B[index] * (-torch.sum(F.softmax(output_x2/Temp, dim=1) * pred, dim=1))
)
) / len(pred) # 对batch中的所有样本取平均
return lossHard部分:
(1 - B) * F.nll_loss(pred, y_a)- 对干净样本,保留ground-truth标签损失。
Soft部分:
B * (-torch.sum(F.softmax(output_x1/Temp) * pred))- 对噪声样本,用模型预测的概率(经过温度平滑)作为soft label计算损失。
MixUp融合:
- 使用
0.5权重对两个混合样本的损失取平均。
- 使用
温度Temp:
- 控制soft label的平滑程度,值越小越接近one-hot,值越大越平滑。
返回值:
- 对整个batch的样本损失取平均。
训练核心主流程
def main():
# 初始化BMM模型及相关参数
bmm_model = bmm_model_maxLoss = bmm_model_minLoss = cont = k = 0
# bootstrap阶段标准训练结束的epoch,+1是因为条件定义为 ">" 或 "<" 而不是 ">="
bootstrap_ep_std = milestones[0] + 5 + 1
# 引导式Mixup开始的epoch
guidedMixup_ep = 106
# 动态Mixup情况下,bootstrap阶段的epoch
if args.Mixup == 'Dynamic':
bootstrap_ep_mixup = guidedMixup_ep + 5
else:
bootstrap_ep_mixup = milestones[0] + 5 + 1
# 用于Soft-Hard Beta的温度控制
countTemp = 1
temp_length = 200 - bootstrap_ep_mixup
# 遍历每个训练epoch
for epoch in range(1, args.epochs + 1):
# 更新学习率调度器
scheduler.step()
### 标准交叉熵训练(不使用Mixup) ###
if args.Mixup == "None":
print('\t##### Doing standard training with cross-entropy loss #####')
loss_per_epoch, acc_train_per_epoch_i = train_CrossEntropy(args, model, device, train_loader, optimizer, epoch)
### 静态Mixup ###
if args.Mixup == "Static":
alpha = args.alpha
bootstrap_ep_mixup = 0
# 前几个epoch进行普通Mixup训练
if epoch < bootstrap_ep_mixup:
print('\t##### Doing NORMAL mixup for {0} epochs #####'.format(bootstrap_ep_mixup - 1))
loss_per_epoch, acc_train_per_epoch_i = train_mixUp(args, model, device, train_loader, optimizer, epoch, 32)
else:
# 后续epoch进行Beta Bootstrapping(Hard或Soft)与普通Mixup结合训练
if args.BootBeta == "Hard":
print("\t##### Doing HARD BETA bootstrapping and NORMAL mixup from the epoch {0} #####".format(bootstrap_ep_mixup))
loss_per_epoch, acc_train_per_epoch_i = train_mixUp_HardBootBeta(
args, model, device, train_loader, optimizer, epoch,
alpha, bmm_model, bmm_model_maxLoss, bmm_model_minLoss,
args.reg_term, num_classes
)
elif args.BootBeta == "Soft":
print("\t##### Doing SOFT BETA bootstrapping and NORMAL mixup from the epoch {0} #####".format(bootstrap_ep_mixup))
loss_per_epoch, acc_train_per_epoch_i = train_mixUp_SoftBootBeta(
args, model, device, train_loader, optimizer, epoch,
alpha, bmm_model, bmm_model_maxLoss, bmm_model_minLoss,
args.reg_term, num_classes
)
## 动态Mixup ##
if args.Mixup == "Dynamic":
alpha = args.alpha
# 前几个epoch进行普通Mixup训练
if epoch < guidedMixup_ep:
print('\t##### Doing NORMAL mixup for {0} epochs #####'.format(guidedMixup_ep - 1))
loss_per_epoch, acc_train_per_epoch_i = train_mixUp(args, model, device, train_loader, optimizer, epoch, 32)
# guidedMixup阶段使用Beta混合分布进行Mixup
elif epoch < bootstrap_ep_mixup:
print('\t##### Doing Dynamic mixup from epoch {0} #####'.format(guidedMixup_ep))
loss_per_epoch, acc_train_per_epoch_i = train_mixUp_Beta(
args, model, device, train_loader, optimizer, epoch, alpha,
bmm_model, bmm_model_maxLoss, bmm_model_minLoss
)
# Soft-Hard Beta与动态Mixup结合训练,并使用温度控制
else:
print("\t##### Going from SOFT BETA bootstrapping to HARD BETA with linear temperature and Dynamic mixup from the epoch {0} #####".format(bootstrap_ep_mixup))
loss_per_epoch, acc_train_per_epoch_i, countTemp, k = train_mixUp_SoftHardBetaDouble(
args, model, device, train_loader, optimizer, epoch,
bmm_model, bmm_model_maxLoss, bmm_model_minLoss,
countTemp, k, temp_length, args.reg_term, num_classes
)
### 跟踪训练损失和BMM模型 ###
epoch_losses_train, epoch_probs_train, argmaxXentropy_train, bmm_model, bmm_model_maxLoss, bmm_model_minLoss = \
track_training_loss(args, model, device, train_loader_track, epoch, bmm_model, bmm_model_maxLoss, bmm_model_minLoss)
# 测试阶段
loss_per_epoch, acc_val_per_epoch_i = test_cleaning(args, model, device, test_loader)训练数据上添加噪声
# Noise without the sample class
def add_noise_cifar_wo(loader, noise_percentage=20):
"""
给 CIFAR 训练集添加噪声标签,但新标签不能与原标签相同。
参数:
loader: CIFAR 数据加载器
noise_percentage: 需要添加噪声的百分比(0~100)
返回:
noisy_labels: 添加噪声后的标签列表
"""
# 固定随机种子,保证实验可复现
torch.manual_seed(2)
np.random.seed(42)
# 复制训练标签
noisy_labels = [sample_i for sample_i in loader.sampler.data_source.train_labels]
# 复制训练图像
images = [sample_i for sample_i in loader.sampler.data_source.train_data]
# 生成每个样本是否加噪声的随机数(0~99)
probs_to_change = torch.randint(100, (len(noisy_labels),))
# 判断哪些样本需要加噪声
idx_to_change = probs_to_change >= (100.0 - noise_percentage)
# 计算实际噪声比例(仅用于信息输出)
percentage_of_bad_labels = 100 * (torch.sum(idx_to_change).item() / float(len(noisy_labels)))
# 对每个需要加噪声的样本进行处理
for n, label_i in enumerate(noisy_labels):
if idx_to_change[n] == 1:
# 构建新标签候选集合,不包含当前原标签
set_labels = list(set(range(10)) - set([label_i]))
# 随机选择一个新标签
set_index = np.random.randint(len(set_labels))
noisy_labels[n] = set_labels[set_index]
# 更新 DataLoader 中的数据和标签
loader.sampler.data_source.train_data = images
loader.sampler.data_source.train_labels = noisy_labels
return noisy_labels
# Noise with the sample class (as in Re-thinking generalization)
def add_noise_cifar_w(loader, noise_percentage=20):
"""
给 CIFAR 训练集添加噪声标签,但新标签可以包含原标签(参考论文 "Re-thinking generalization")。
参数:
loader: CIFAR 数据加载器
noise_percentage: 需要添加噪声的百分比(0~100)
返回:
noisy_labels: 添加噪声后的标签列表
"""
# 固定随机种子,保证实验可复现
torch.manual_seed(2)
np.random.seed(42)
# 复制训练标签
noisy_labels = [sample_i for sample_i in loader.sampler.data_source.train_labels]
# 复制训练图像
images = [sample_i for sample_i in loader.sampler.data_source.train_data]
# 生成每个样本是否加噪声的随机数(0~99)
probs_to_change = torch.randint(100, (len(noisy_labels),))
# 判断哪些样本需要加噪声
idx_to_change = probs_to_change >= (100.0 - noise_percentage)
# 计算实际噪声比例(仅用于信息输出)
percentage_of_bad_labels = 100 * (torch.sum(idx_to_change).item() / float(len(noisy_labels)))
# 对每个需要加噪声的样本进行处理
for n, label_i in enumerate(noisy_labels):
if idx_to_change[n] == 1:
# 构建新标签候选集合,包含所有可能标签(包括原标签)
set_labels = list(set(range(10)))
# 随机选择一个新标签
set_index = np.random.randint(len(set_labels))
noisy_labels[n] = set_labels[set_index]
# 更新 DataLoader 中的数据和标签
loader.sampler.data_source.train_data = images
loader.sampler.data_source.train_labels = noisy_labels
return noisy_labels附录
本节在主论文的基础上,对提出的无监督 Beta 混合模型(BMM)进行扩展讨论,提供更多细节。
低标签噪声下的 BMM 性能
我们希望在标签噪声存在的情况下实现稳健的表示学习,这种噪声可能在自动标注的图像中出现。在几乎无噪声(接近 0%)的精心标注数据集上,性能可能下降,因为损失分布不再是双组分混合。在这种情况下,BMM 几乎会将所有样本分类为干净样本,但仍可能存在一些估计误差,导致有时依赖错误的网络预测而非真实干净标签。然而,对于 20% 的标签噪声,我们在训练结束时仍优于比较的最先进方法,显示出在低噪声水平下的鲁棒性提升。
BMM 参数估计频率
一旦开始进行损失修正(即初始 warm-up 阶段如 4.1 节所述,不进行损失修正),BMM 参数会在每个训练周期后重新估计,通过使用原始(可能含噪声)标签的前向传播计算交叉熵损失。我们还测试了 M-DYR-H(CIFAR-10, 80% 标签噪声)在不同估计周期下的表现:5 个 epoch 和 0.5 个 epoch,发现精度没有下降。原始配置(如图 4(a) 所示)在最佳/最后一次分别达到 86.8 / 86.6,而每 5 个 epoch 重新估计分别为 86.9 / 86.8,每 0.5 个 epoch 为 88.0 / 87.5。
BMM 分类精度与鲁棒性
图 4(b) 展示了 BMM 在训练过程中干净/噪声样本分类能力的 AUC(曲线下面积)演化,显示性能和鲁棒性在不同噪声水平下保持一致。特别是在 CIFAR-10 上,M-DYR-H 在 20%、50% 和 80% 标签噪声下的 AUC 均超过 0.98。训练过程中 AUC 不断增加,对于低噪声水平增加更快,显示出 BMM 随时间对干净/噪声样本判别能力越来越好,并保持一致性预测。
BMM 分类精度对图像分类准确率的影响
BMM 的预测精度对高图像分类准确率至关重要,如图 4(a) 和 4(b) 所示,图像分类准确率与 BMM 分类精度呈同步上升趋势,尤其在高噪声水平下更为明显。图 4(c) 进一步验证了这一关系,通过将 BMM 与 GMM(高斯混合模型)在 CIFAR-10 上进行对比(M-DYR-H,80% 标签噪声)。GMM 的干净/噪声判别能力较差,图像分类准确率也下降(干净/噪声 AUC 从 0.98 降至 0.94,图像分类准确率从 86.6 降至 83.5)。
BMM 对性能的贡献
引入 BMM 得到的损失不仅仅是正则化效果。通过移除 BMM 并在自举损失中使用固定权重(将 0.8 权重分配给 GT,0.2 权重分配给网络预测,同时保持 mixup 增强稳健性),性能会显著下降。在 CIFAR-10 80% 标签噪声下,M-DYR-H 的最后 epoch 准确率从 86.6 降至 74.6。