
位置编码
绝对位置编码(Absolute Positional Encoding, APE)
正弦/余弦位置编码(Sinusoidal Positional Encoding)
正弦余弦位置编码(Sinusoidal Positional Encoding)是一种无需训练的位置编码方法,它通过固定的周期性函数(正弦和余弦)来为序列的不同位置提供唯一的编码。对于每个位置
假设:我们要计算输入序列第 2 个位置 Token 对应的位置编码,编码的维度设定为 4 ,则:
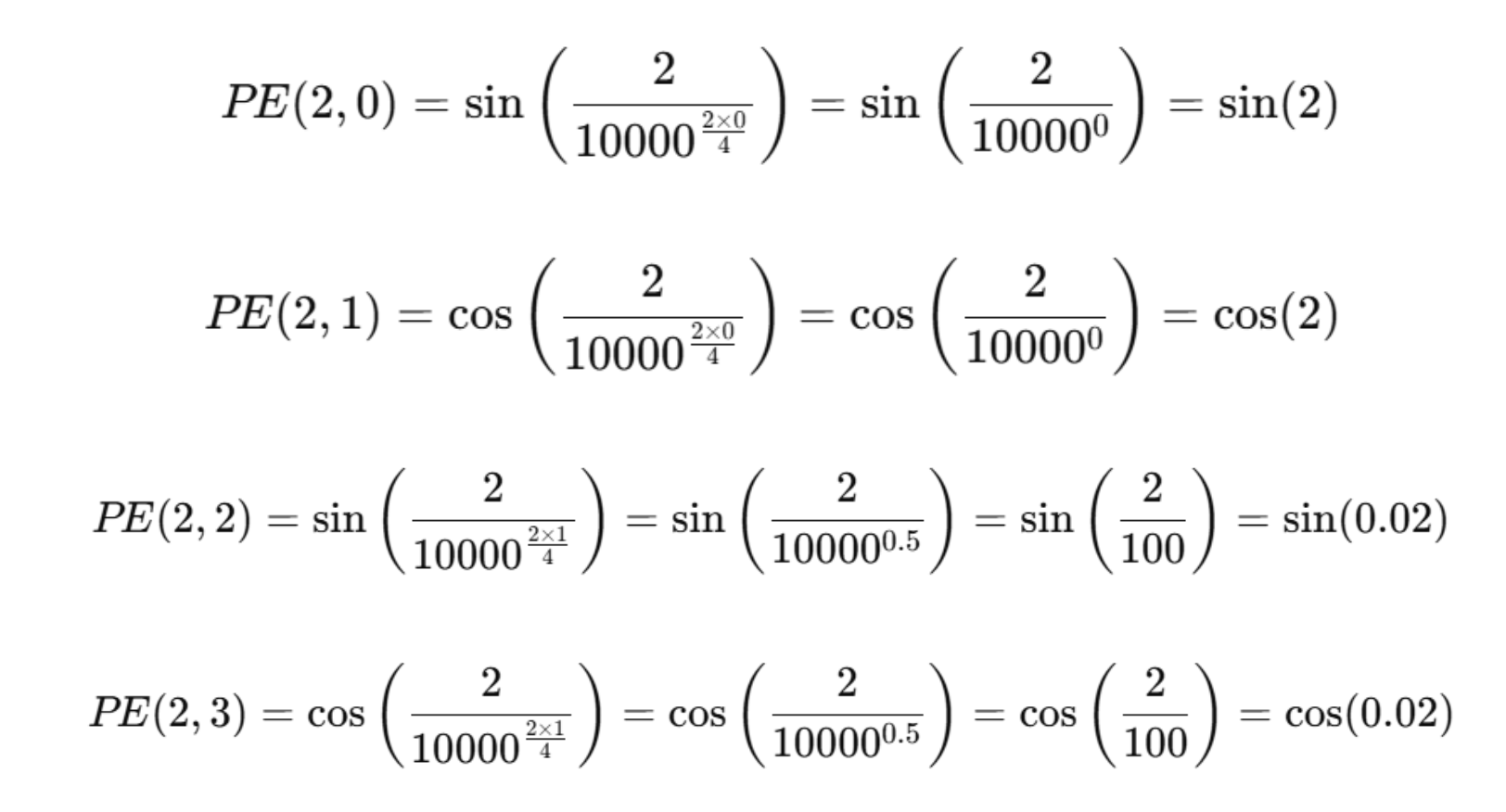
最终,位置 2 的编码向量为:
计算起来是比较容易的,如何去理解这个位置编码?请看下面这张图:
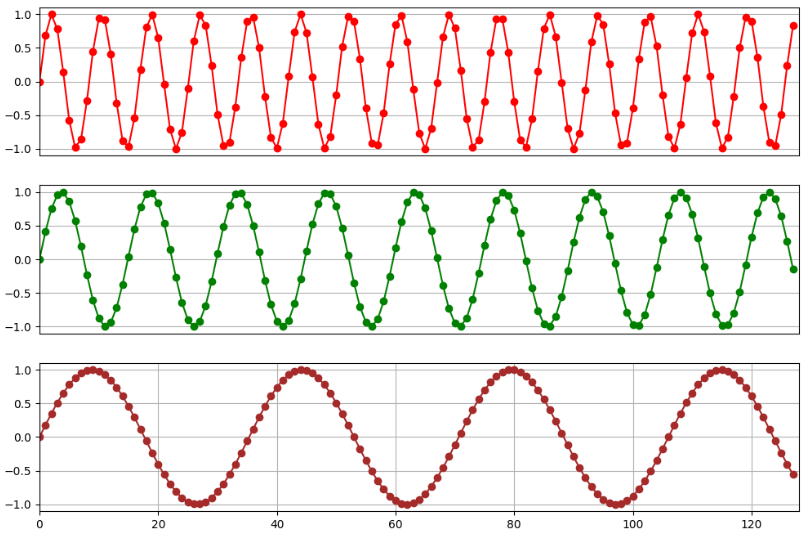
这三张图分别打印了 128 个位置向量第 2、6、12 维度的编码值的变化,我们发现这些值呈现周期性的变化。另外,我们也可以发现,向量维度越高,其周期就越长。
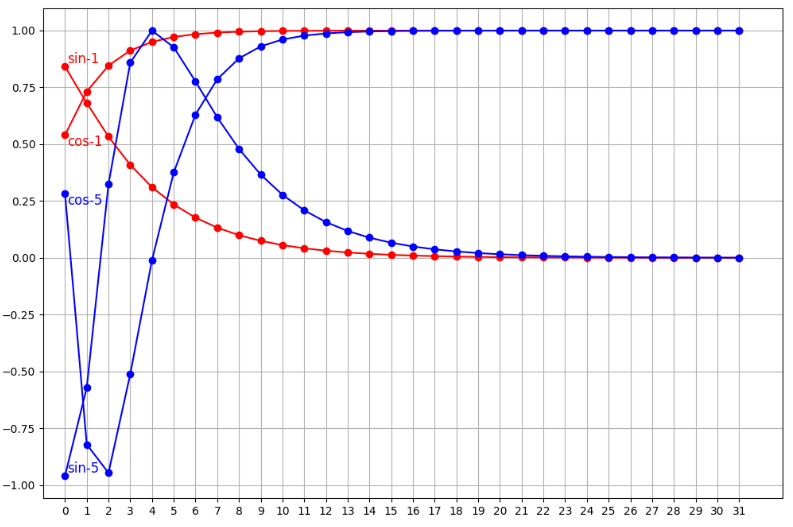
上图,我们打印了位置 1、5 的编码向量中的 sin 和 cos 计算得到的编码值。我们可以发现,基于正弦和余弦函数得到的位置编码可以保证唯一性。另外,也可以看到,向量的维度越高,编码值的波动就越小,向量就越接近。
简单总结下:
因为正弦和余弦函数都是周期函数,编码在不同维度上具有不同的周期性
位置编码向量是唯一的,因为不同位置的编码由不同的正弦和余弦值组成
低维度的编码值波动性很大(周期短),高纬度的编码值波动性较小(周期长)
所以,可以得到一个简单的结论:
低维分量(小 i)的变化较快,主要捕捉局部位置关系
高维分量(大 i)的变化较慢,可以用于编码全局信息
这个怎么去理解?我们把某个位置的向量大概划分为两部分:低维向量部分 + 高维向量部分,低纬向量部分数值波动幅度很大,在一个周期内只能包含少量相邻的位置,并且一定程度上也表达了位置的局部的相对信息,这就是捕捉局部位置关系。那么,对于高纬向量部分而言,它的波动幅度很小,一个周期能够包含更多的位置信息,这也是我们理解的编码全局位置信息的含义。
所以,对于一个基于正弦余弦编码的位置向量,可以理解为该向量中隐含了一些局部和全局的位置信息。使得 Transformer 既能感知局部相对位置,也能感知全局位置信息,从而弥补其原生结构中缺少位置感知能力的缺陷。
当然,这种位置编码方法也存在以下一些不足之处:
随着序列长度的增加,位置编码的周期性可能导致不同位置之间的区分度逐渐降低,难以准确表示极长序列中各个位置的独特信息。
虽然正弦余弦位置编码能够隐含地表达一定的局部位置信息,但由于它是固定的、不可学习的,并没有专门针对局部依赖关系进行优化,因此在建模局部依赖关系时能力相对不足。
正弦余弦位置编码是一种基于三角函数的固定编码方式,它是一种静态的位置信息表示。而注意力机制更关注的是文本中不同位置之间的动态语义关联。这两种信息在表示形式和语义侧重点上存在差异,导致在融合时可能无法很好地相互补充。
正弦余弦位置编码通常是高维向量,其计算量会随着维度的增加不仅需要更多的计算时间,还可能占用大量的内存空间,影响模型的运行效率。
正余弦位置编码通过在不同维度上引入不同波长的正余弦信号,使得低维对局部位置变化敏感,高维对全局位置变化敏感。虽然位置和语义在所有维度上混合,但在训练中,模型可能学到一种“低维更多位置,高维更多语义”的分工模式。
基于可学习的嵌入
可学习的位置编码(Learnable Positional Encoding, LPE)是一种通过梯度下降自动学习位置编码的方法,不同于固定编码(如正弦/余弦函数编码),它不依赖任何手工设计的公式,而是直接让模型在训练过程中优化位置信息。对于一个长度为 𝐿 的输入序列,每个位置 𝑖 都对应一个可学习的向量。当训练或测试时,将输入 Token 的编码和对应位置的可学习位置编码向量相加,从而赋予 Token 相应的位置信息。
这种位置编码方式能够根据具体的任务和数据特点,模型可以学习到更适合该类文本的位置表示方式,捕捉文本中位置相关的语义和结构信息,这是固定的位置编码(例如:正弦余弦位置编码)难以做到的。但是也存在一些不足之处,例如:
如果训练时 max_len=512,测试时输入 1024 长度的序列,模型就无法处理了
需要存储 max_len×d_model 维度的参数,可能导致大模型训练更难收敛
相对位置编码(Relative Position Encoding, RPE)
相对位置编码直接对 两个 token 之间的距离 建模。例如:
token i 关注 token j 时,注意力分数不仅取决于它们的内容,还取决于 i - j 的相对位置。
如果两个位置的相对距离相同,那么它们的相对位置信息也是相同的(模型可以更好泛化到更长的序列)。
Relative Position Representations (Shaw et al., 2018)
普通自注意力打分公式:
其中:
Shaw 相对位置编码改成:
这里:
只要知道
下面先给出完整代码实现,然后再进行详细解析:
import torch
import torch.nn as nn
import math
class RelPosAttention(nn.Module):
def __init__(self, d_model, n_heads, max_len):
super().__init__()
self.n_heads = n_heads
self.d_k = d_model // n_heads
self.W_q = nn.Linear(d_model, d_model)
self.W_k = nn.Linear(d_model, d_model)
self.W_v = nn.Linear(d_model, d_model)
self.W_o = nn.Linear(d_model, d_model)
self.rel_emb = nn.Embedding(2 * max_len - 1, self.d_k) # 相对位置向量表
self.max_len = max_len
def forward(self, x):
B, L, _ = x.size()
assert L <= self.max_len, "输入序列长度超过max_len"
Q = self.W_q(x).view(B, L, self.n_heads, self.d_k).transpose(1, 2) # (B, h, L, d_k)
K = self.W_k(x).view(B, L, self.n_heads, self.d_k).transpose(1, 2)
V = self.W_v(x).view(B, L, self.n_heads, self.d_k).transpose(1, 2)
# ===== 1. 普通注意力部分 =====
content_score = torch.matmul(Q, K.transpose(-2, -1)) # (B, h, L, L)
# ===== 2. 相对位置部分 =====
# 相对位置索引矩阵
rel_pos = torch.arange(L, device=x.device).unsqueeze(1) - torch.arange(L, device=x.device).unsqueeze(0)
rel_pos += self.max_len - 1 # shift到[0, 2L-2]
R = self.rel_emb(rel_pos) # (L, L, d_k)
# 使用爱因斯坦求和公式计算 Q_i ⋅ R_{i-j}
pos_score = torch.einsum('bhld,lmd->bhlm', Q, R)
# ===== 3. 合并并归一化 =====
scores = (content_score + pos_score) / math.sqrt(self.d_k)
attn = torch.softmax(scores, dim=-1)
out = torch.matmul(attn, V) # (B, h, L, d_k)
out = out.transpose(1, 2).contiguous().view(B, L, -1)
return self.W_o(out)首先来看一下 Shaw 相对位置编码中的相对位置矩阵的详解:
- 生成相对位置差矩阵
rel_pos = torch.arange(L, device=x.device).unsqueeze(1) - torch.arange(L, device=x.device).unsqueeze(0)假设序列长度 L = 4,torch.arange(L) 是:
[0, 1, 2, 3]unsqueeze(1)变成列向量 shape(4,1)unsqueeze(0)变成行向量 shape(1,4)
做减法(广播规则):
[[ 0-0, 0-1, 0-2, 0-3],
[ 1-0, 1-1, 1-2, 1-3],
[ 2-0, 2-1, 2-2, 2-3],
[ 3-0, 3-1, 3-2, 3-3]]结果是:
[[ 0, -1, -2, -3],
[ 1, 0, -1, -2],
[ 2, 1, 0, -1],
[ 3, 2, 1, 0]]含义:第 i 行第 j 列的值就是 i - j,即 token i 与 token j 的相对距离。
- 平移到正索引区间
rel_pos += self.max_len - 1Embedding 的索引必须是 非负整数,所以要把负值平移到正数区间。如果 max_len=4,self.max_len - 1 = 3,加 3 后:
[[3, 2, 1, 0],
[4, 3, 2, 1],
[5, 4, 3, 2],
[6, 5, 4, 3]]值域范围是 [0, 2*max_len-2]。这正好对应 self.rel_emb 的 embedding 表大小 (2*max_len - 1, d_k)。
- 查表得到相对位置向量
R = self.rel_emb(rel_pos) # shape: (L, L, d_k)self.rel_emb 是一个可训练的 embedding 表,每个相对距离对应一个向量。rel_pos 的形状是 (L, L),查表后:
第一维 = 查询位置 i
第二维 = 被关注位置 j
第三维 = 对应的相对位置编码向量
d_k
所以 R 是一个 (L, L, d_k) 张量。
- 用爱因斯坦求和公式计算位置分数
pos_score = torch.einsum('bhld,lmd->bhlm', Q, R)先看两个输入的形状:
Q:
(B, h, L, d_k)B= batch 大小h= 注意力头数L= 序列长度(查询 token 的位置)d_k= 每个头的向量维度(Q 向量长度)
R:
(L, L, d_k)第 1 维:查询位置 index
第 2 维:被关注位置 index
第 3 维:与相对位置
d_k)
爱因斯坦求和规则: 'bhld,lmd->bhlm'
左边 Q 的维度:
b h l d右边 R 的维度:
l m d两者中相同字母代表要“配对”的轴:
l:查询位置 i → 保持不变(参与配对但保留在输出里)d:向量维度 → 相同字母且不出现在输出,表示要相乘后求和(点积)
不同字母:
m:来自 R 的“被关注位置”维度,出现在输出b、h:来自 Q 的 batch 和头维度,直接保留
我们想算:
固定 batch
b、headh、查询位置l、被关注位置m从 Q 里取对应的查询向量
从 R 里取对应的相对位置向量
对它们做向量点积(沿
d维求和)
- 为什么相对位置矩阵
在标准自注意力中,打分是:
其中:
这两个向量都在同一个向量空间中(维度 d_k),点积才能得到一个有意义的相似度分数。Shaw 的做法是:
第二项的解释:
d_k维的向量空间中。用
Q_i一致的表示空间。这样得到的结果是一个标量,可以直接和
Q·K的结果相加。
换句话说:
K 部分带来内容相关性
R 部分带来位置相关性
二者都要在同一个“Q 向量的视角”下衡量,所以都用
可以把注意力打分看作“你(i)对别人(j)的关注程度”,它可能由两部分组成:
内容相似度:你关心和你内容类似的人(Q·K)
位置偏好:你关心离你近的人(Q·R)
T5 相对位置偏置(Relative Position Bias, RPB)
在自注意力里,注意力打分是
T5 在这个分数上再加一个与“相对距离”相关的标量偏置:
为了参数更省、泛化更好,T5 不为每个距离单独学一个参数,而是把距离映射到少量“桶”(bucket):近距离用细桶、远距离用粗桶(对数分桶)。
每个桶学一个标量偏置,通常 按头(per-head)独立学习(形状:
[num_buckets, n_heads]),再广播到(B, n_heads, L_q, L_k)。
这样既让模型“偏好临近”或“惩罚太远”,又几乎不增加计算量。
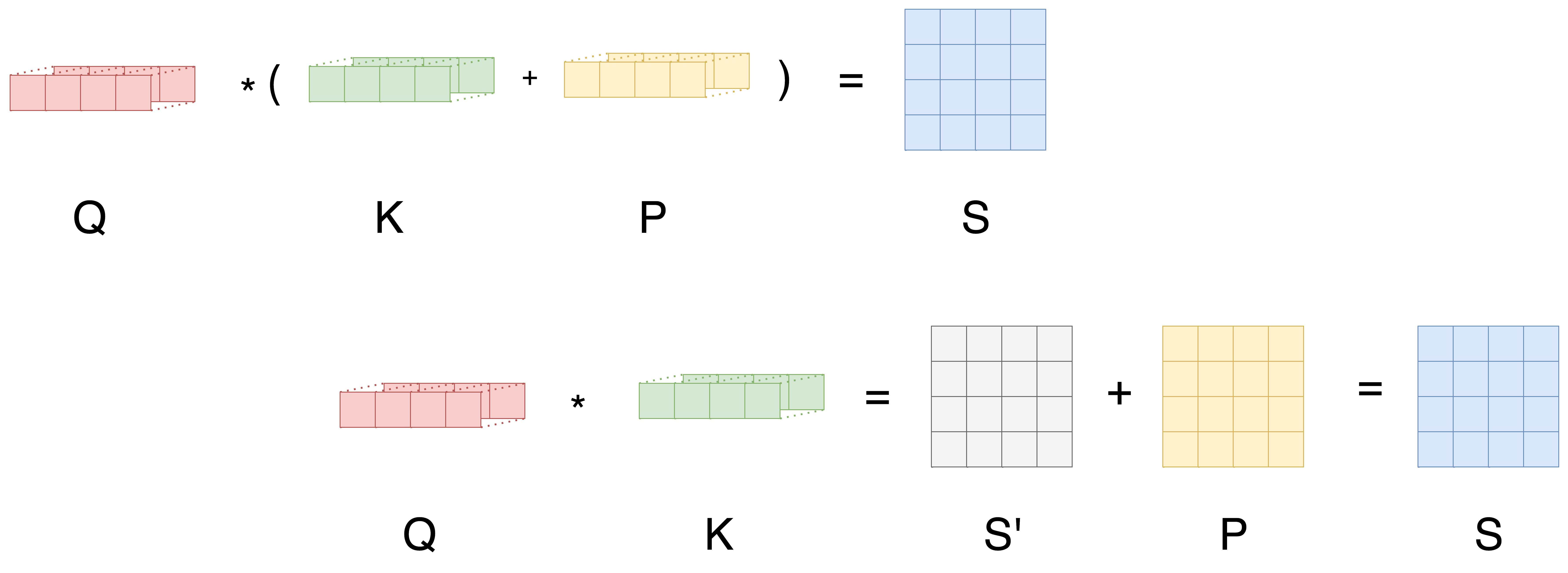
Shaw RPR:相对位置像“额外的 Key 特征”,参与点积计算
T5 RPB:相对位置像“分数修正表”,只在 attention 分数上加偏置
- 偏置表(bias table)怎么理解 ?
bias_table = nn.Parameter(torch.zeros(num_buckets, H))num_buckets:表示“相对位置的分组数量”。
T5 并不对每个相对位置都单独存一个偏置,而是把相对距离压缩到若干个桶(bucket)里。
比如小距离 1、2、3 可以映射到同一个桶,远距离可能映射到不同桶。
H:表示注意力头数,每个头的偏置可以不同。
- 不同头可以学习到不同的相对位置偏置模式,比如一个头关注短距离,一个头关注长距离。
偏置表作用:
偏置表里的每个元素是一个标量,它对应某个相对位置桶 + 注意力头的偏置。
它不会参与点积运算,只是直接加到注意力分数上:
- 通过加偏置,模型可以编码“相对位置信息”,比如让模型偏向关注附近的 token。
可以想象成一个小表格:
| 桶 (bucket) | head0 | head1 | head2 |
|---|---|---|---|
| 0 | 0.1 | -0.2 | 0.05 |
| 1 | 0.3 | 0.0 | 0.1 |
| 2 | -0.1 | 0.2 | 0.0 |
| … | … | … | … |
每一列 = 一个头的所有偏置
每一行 = 一个相对距离桶的偏置
当模型计算注意力分数时,它会根据 query-key 的相对距离找到对应的桶,然后查表取出偏置,加到该头的注意力分数上。
- 桶的作用是什么 ?
我们已经有了 相对位置矩阵 relative_position[i,j] = j - i ,例如长度 8 的序列:
i\j 0 1 2 3 4 5 6 7
0 0 1 2 3 4 5 6 7
1 -1 0 1 2 3 4 5 6
2 -2 -1 0 1 2 3 4 5
3 -3 -2 -1 0 1 2 3 4
...- 每个元素表示 query i 对 key j 的相对距离
问题:序列很长时,如果直接为每个距离学习偏置,参数量会非常大。
桶映射的目的:
把相对距离压缩到固定数量的桶里
T5 的做法:小距离用独立桶,大距离用对数压缩的桶
这样:
短距离:每个距离有自己的偏置(细粒度)
长距离:距离较大的 token 共享同一桶(粗粒度)
优点:
节省参数
保持模型关注短距离精细信息,同时对长距离不必过于精细
假设 num_buckets = 4(简化):
relative_position ≤ 1 → bucket 0
relative_position = 2 → bucket 1
relative_position = 3~4 → bucket 2
relative_position > 4 → bucket 3
对序列 [A,B,C,D]:
relative_position:
i\j 0 1 2 3
0 0 1 2 3
1 -1 0 1 2
2 -2 -1 0 1
3 -3 -2 -1 0
映射到桶 (bucket):
i\j 0 1 2 3
0 0 0 1 2
1 0 0 0 1
2 1 0 0 0
3 2 1 0 0每个元素都变成了 0~num_buckets-1 的整数
这个整数就是偏置查表的索引
核心理解:
相对位置桶 = “距离分组”
通过桶映射,可以让模型 对短距离敏感,对长距离粗略处理
桶号最终用来查
bias_table,得到每个 query-key 对的偏置
- 整体流程 ?
假设:
batch size:
B序列长度:
L注意力头数:
H相对位置桶数:
num_buckets
(1) 偏置表
bias_table = nn.Parameter(torch.zeros(num_buckets, H))shape:
(num_buckets, H)每个桶每个头都有一个标量偏置
(2) 相对位置矩阵
relative_position = memory_position - context_position # (L,L)shape:
(L, L)值是
j-i,表示 query i 对 key j 的相对位置
(3) 桶映射
relative_buckets = relative_position_bucket(relative_position) # (L,L)shape:
(L,L)每个元素是 0~
num_buckets-1
(4) 查表得到偏置
bias = bias_table[relative_buckets] # (L,L,H)
bias = bias.permute(2,0,1) # (H,L,L)bias_table[relative_buckets]用每个(i,j)桶号查表得到
(L,L,H),然后换维度到(H,L,L),方便加到注意力分数
(5) 广播 batch
注意力分数:
attn_scores = Q @ K.transpose(-1,-2) # (B,H,L,L)
attn_scores = attn_scores + bias.unsqueeze(0) # (B,H,L,L)bias.unsqueeze(0)shape →(1,H,L,L)自动广播到 batch 维度
(B,H,L,L)每个头有独立偏置,不同 batch 共用
(6) 相加过程总结
先算 原始注意力分数:
Q @ K^T→(B,H,L,L)查表得到 相对位置偏置:
bias→(H,L,L)加到注意力分数:
最终 shape 仍然
(B,H,L,L),用于 softmax
代码实现如下:
import torch
import torch.nn as nn
class T5RelativePositionBias(nn.Module):
def __init__(self, num_buckets=32, max_distance=128, n_heads=12):
super().__init__()
self.num_buckets = num_buckets
self.max_distance = max_distance
self.n_heads = n_heads
# 偏置表:每个 bucket 对每个 attention head 存一个标量
self.relative_attention_bias = nn.Embedding(num_buckets, n_heads)
def _relative_position_bucket(self, relative_position):
"""
将相对位置映射到 [0, num_buckets-1] 的桶索引。
设计目的:
- 相对位置可能范围很大(如 -512 ~ +512)
- 如果直接给每个位置都分配一个独立参数,参数量会很大
- 解决方法:
1. 对短距离用线性分桶(精确表示)
2. 对长距离用对数分桶(粗略表示)
3. 可选地分开处理方向(左/右)
参数:
relative_position: torch.Tensor
- 形状 (Lq, Lk) 或 (..., Lq, Lk)
- 元素为 key_position - query_position
负数:key 在 query 左边
正数:key 在 query 右边
返回:
ret: torch.LongTensor
- 形状与 relative_position 相同
- 每个元素是该相对位置对应的桶编号
"""
num_buckets = self.num_buckets # 桶的总数量,例如 32
max_distance = self.max_distance # 能映射的最大距离(超过按最大处理)
ret = 0 # 初始化桶编号
# 1. 取反(T5 定义相对位置为 memory_pos - context_pos,这里保持一致性)
n = -relative_position # n < 0 表示 key 在 query 右边,n > 0 表示 key 在 query 左边
# 2. 方向分桶(可选)
# 如果 key 在 query 左边 (n < 0),桶号加 num_buckets//2
# 这样前一半桶表示左方向,后一半桶表示右方向
ret += (n < 0).to(torch.long) * num_buckets // 2
# 3. 只取绝对值(方向信息已在上一步编码)
n = torch.abs(n)
# 4. 定义短距离线性映射的阈值
# 前一半桶(num_buckets//2)用于精确表示短距离
max_exact = num_buckets // 2 # 例如 num_buckets=32 时,max_exact=16
# 5. 判断哪些是短距离
is_small = n < max_exact # 布尔张量
# 6. 对长距离做对数映射
# - 将距离范围 [max_exact, max_distance] 映射到桶 [max_exact, num_buckets-1]
# - 对数映射可以把大范围的距离压缩到少量桶
val_if_large = max_exact + (
(torch.log(n.float() / max_exact) / # 距离归一化并取对数
torch.log(max_distance / max_exact)) # 对数分母:归一化最大距离
* (num_buckets - max_exact) # 映射到长距离桶区间
).to(torch.long)
# 7. 防止溢出(大于最大桶号的全部压到最后一个桶)
val_if_large = torch.min(
val_if_large,
torch.full_like(val_if_large, num_buckets - 1)
)
# 8. 根据距离类别(短/长)选择桶编号
ret += torch.where(is_small, n, val_if_large)
return ret
def forward(self, query_length, key_length):
"""
返回 shape (1, n_heads, query_length, key_length) 的偏置矩阵
"""
# 计算相对位置矩阵 (i - j)
context_pos = torch.arange(query_length)[:, None] # (Lq, 1)
memory_pos = torch.arange(key_length)[None, :] # (1, Lk)
relative_position = memory_pos - context_pos # (Lq, Lk)
# 映射到桶索引
rp_bucket = self._relative_position_bucket(relative_position)
# 查表获取偏置值 (Lq, Lk, n_heads)
values = self.relative_attention_bias(rp_bucket)
# 调整维度 → (1, n_heads, Lq, Lk),方便加到 attention scores 上
values = values.permute(2, 0, 1).unsqueeze(0)
return valuesStep 1 — 偏置表的定义
self.relative_attention_bias = nn.Embedding(num_buckets, n_heads)形状 =
(num_buckets, n_heads)表示每个 桶 对应每个 注意力头 的一个标量偏置
为什么是 Embedding:
桶号是整数索引(0~num_buckets-1)
Embedding 可以高效查表
Step 2 — 构造相对位置矩阵
context_pos = torch.arange(query_length)[:, None] # (Lq, 1)
memory_pos = torch.arange(key_length)[None, :] # (1, Lk)
relative_position = memory_pos - context_pos # (Lq, Lk)(i,j)元素 =j - i例如
L=4:
[[0, 1, 2, 3],
[-1, 0, 1, 2],
[-2, -1, 0, 1],
[-3, -2, -1, 0]]Step 3 — 相对位置桶映射
rp_bucket = self._relative_position_bucket(relative_position)目的:把
[-max_len, +max_len]映射到0 ~ num_buckets-1T5策略:
短距离(
|n| < max_exact)→ 线性映射,每个距离单独一个桶长距离 → 对数映射,多个距离共享一个桶
正负方向可能分桶(方向信息保留)
结果:桶矩阵 shape
(Lq, Lk),值是整数
Step 4 — 查表获取偏置
values = self.relative_attention_bias(rp_bucket) # (Lq, Lk, n_heads)对
(i,j)的桶号rp_bucket[i,j],查表得到 shape(n_heads,)的偏置最终得到
(Lq, Lk, n_heads),即每个位置对每个 head 的偏置值
Step 5 — 调整维度以便加到注意力分数
values = values.permute(2, 0, 1).unsqueeze(0) # (1, n_heads, Lq, Lk)attention 分数 shape =
(batch, n_heads, Lq, Lk)偏置加法公式:
unsqueeze(0)是为了 batch 维度可广播
Step 6 — 加到注意力分数的时机
在 T5 的多头注意力里,这一步通常是这样做的:
scores = torch.matmul(Q, K.transpose(-1, -2)) # (B, H, Lq, Lk)
scores += position_bias # (1, H, Lq, Lk) 广播相加区别于 Shaw 2018 的做法(它在 Q·K 之前,把位置向量加到 K 里),T5 是在 attention scores 已经计算完之后 再加偏置。
一句话总结:
T5 RPB 用 桶映射 + 查表 的方式,为每个 query-key 对加一个与相对位置有关的标量偏置(每个 head 单独学习),它是在注意力分数计算完之后加上去的,因此只需要二维标量表,不需要像 Shaw 那样存整个向量矩阵。